تمثيل كهربي - ميكانيكي
التمثيل الكهربي - الميكانيكي هو تمثيل الأنظمة الميكانيكية على شكل دوائر كهربية. في البداية تم ابتكار التمثيل الكهربي - الميكانيكي ليساعد على تفسير حدوث ظواهر شبيهة بالظواهر الكهربية في الأجزاء الميكانيكية. حيث قدم جيمس كليرك ماكسويل تمثيلًا من هذا النوع في القرن 19، ومع تطور علم الدوائر الكهربية؛ وُجِدَ أن بعض المسائل الميكانيكية يمكن حلها بسهولة من خلال التمثيل الكهربي، وكانت التطورات النظرية في المجال الكهربائي مفيدة بشكل خاص في تمثيل الشبكات الكهربية (رسم الدوائر الكهربية) باستخدام نموذج العناصر المجمع والقدرة على تحليل الدوائر الكهربية، مما ساعد على سهولة حل المسائل الكهربية، وتحويل المسائل الميكانيكية إلى مسائل كهربية.
هذا الأسلوب مفيد بشكل خاص في تصميم المرشحات الميكانيكية؛ لأنها تستخدم أجهزة ميكانيكية لتنفيذ وظيفة كهربية؛ بيد أن هذا الأسلوب يمكن استخدامه لحل المسائل الميكانيكية البحتة، ويمكن أيضًا استخدامها في مجالات الطاقة وغيرها. ويعتبر التحليل بالتمثيل الكهربي أداة تصميم أساسية خاصة عند تحليل أكثر من مجال طاقة في نفس الوقت؛ حيث يمتلك هذا الأسلوب ميزة رئيسة وهي أنه يمكن تمثيل النظام بأكمله بنفس الوحدة ونفس الطريقة. يُستخدَم التمثيل الكهربي بشكل خاص من قبل مصممي محولات الطاقة بحكم طبيعة المحولات أنها تتعامل مع مجالات طاقة مختلفة، وفي أنظمة التحكم حيث تقوم المستشعرات والمشغلات بالتحويل بين مجالات الطاقة المختلفة.
طُوِّرَ التمثيل الكهربي الميكانيكي عن طريق إيجاد علاقات بين المتغيرات في المجال الميكانيكي التي لها صيغة رياضية متطابقة مع المتغيرات في المجال الكهربي، لذلك يوجد عدة تمثيلات ممكنة وليس تمثيل واحد فقط، لكن هناك تمثيلان هما الأكثر شيوعًا: تمثيل المعاوقة، وتمثيل القبولية. تمثيل المعاوقة يتم فيه تمثيل القوة الميكانيكية بالجهد الكهربي، بينما تمثيل القبولية يمثل القوة بالتيار الكهربي، بالطبع لا يكفي تمثيل متغير واحد بل يجب تمثيل باقي المتغيرات، الاختيار الشائع هو اختيار متغيرات القدرة المترافقة، والتي يكون ناتج حاصل ضربها بوحدة القدرة، فمثلًا في تمثيل المعاوقة؛ يتم تمثيل القوة والسرعة بالجهد والتيار، وكلاهما يعطي حاصل ضربهما القدرة (سواء كانت كهربية أوميكانيكية).
تختلف التمثيلات المستخدمة في الأنظمة الميكانيكية ذات الحركة الدورانية مثل المحركات الكهربائية، فبدلًا من القوة؛ يتم تمثيل عزم الدوران بالجهد الكهربي، كما تختلف التمثيلات في أنظمة الميكانيكا الصوتية وميكانيكا الموائع، مثل تمثيل الضغط بالجهد الكهربي.
التطبيقات
يستخدم التمثيل الكهربي الميكانيكي لتمثيل وظيفة نظام ميكانيكي بنظام كهربي مماثل عن طريق رسم المتغيرات المتماثلة بينهما. النظام الميكانيكي في حد ذاته يمكن تمثيله بالمتغيرات الميكانيكية، ولكن يُفضَّل بالطبع التمثيل الكهربي الميكانيكي خاصةً في الأنظمة الكهروميكانيكية؛ حيث الأجزاء الميكانيكية والكهربائية مُدمَجة في نظام واحد، كما أن هذا التمثيل مفيد في دراسة وتحليل المرشحات الميكانيكية. حيث أنها مصممة لتنفيذ وظيفة كهربية من خلال محولات الطاقة. إن التطور الحادث في مجال نظريات الدوائر الكهربية يمكن استخدامه في التصميم الميكانيكي.من خلال التمثيل الكهربي الميكانيكي.[1]
كما أن التمثيل الكهربي الميكانيكي مفيد بشكل عام في مجال محولات الطاقة بين مختلف مجالات الطاقة.[معلومة 1] يستخدم أيضًا في تمثيل الأجزاء الميكانيكية في الأنظمة الصوتية مثل المخزن المغناطيسي والفونوغراف، حيث كان هذا الأمر له بعض الأهمية في بداية ظهور الفونغراف حيث ينتقل الصوت من المخزن المغناطيسي إلى البوق من خلال مكونات ميكانيكية مختلفة بدون مضخمات كهربية، كانت الفونغرافات الأوائل تعاني بشدة من الرنين غير المرغوب في الأجزاء الميكانيكية، وقد وُجِدَ أن هذا الخلل يمكن القضاء عليه من خلال معالجة الأجزاء الميكانيكية مثل مرشح الترددات المنخفضة.[2]
يمكن استخدام التمثيل الكهربي للأنظمة الميكانيكية كوسيلة تعليمية مساعدة، للمساعدة في فهم سلوك الأنظمة الميكانيكية، بينما كان العكس هو المستخدم في أوائل القرن 20، حيث كانت التمثيلات الميكانيكية مفهومة أكثر من الظواهر الكهربية.[3]
تكوين التمثيل
توصف الأنظمة الكهربية عن طريق مخططات رسم الدوائر الكهربية، هذه المخططات لا تحاول تمثيل المكونات الكهربائية بأبعادها الحقيقية أو بمكانها الفعلي بالنسبة إلى بعضها البعض، وذلك لأن المكونات الكهربية يتم تمثيلها على شكل عناصر مثالية، يتم التعامل مع هذه العناصر على أنها تحتل نقطة واحدة في الدائرة، أما المكونات غير المثالية فيتم تمثيلها باستخدام أكثر من عنصر مثالي، فعلى سبيل المثال؛ يُمثَّل الملف على أنه يحتوي على محث ومقاومة، فنقوم بتمثيل الملف بمقاومة مرسومة على التوالي مع محث.[4] لذلك فإن أول خطوة في تكوين التمثيل الميكانيكي هي وصفه بمخطط شبيه بمخططات رسم الدوائر الكهربية،[1] عن طريق تمثيل النظام الميكانيكي على شكل عناصر مثالية.[5]
في مخططات رسم الدوائر الكهربية التي تقتصر على الأنظمة الخطية؛ هناك ثلاثة مكونات إلكترونية سلبية هي: المقاومة، والحث (الملف)، والسعة (المكثف)، واثنين من العناصر النشطة: مصدر الجهد الكهربي، مصدر التيار الكهربي.[معلومة 2] لبناء مخططات الرسم الميكانيكية نستخدم هذه العناصر كنظائر للمكونات الميكانيكية، فيتم إيجاد علاقات بين المتغيرات في المجال الميكانيكي التي لها صيغة رياضية متطابقة مع المتغيرات في المجال الكهربي، لذلك يوجد عدة اختيارات ممكنة، الاختيار الشائع هو اختيار متغيرات القدرة المترافقة (الموضح أدناه) واختيار المتغيرات الهاملتونية المشتق من الأول.[6]
اختيار متغيرات القدرة المترافقة
متغيرات القدرة المترافقة هي زوج من المتغيرات يكون حاصل ضربها يساوي القدرة، في المجال الكهربائي متغيرات القدرة المترافقة هي دائمًا الجهد (v) والتيار (i)، وبالتالي يتم تمثيلها بمتغيرات القدرة المترافقة في المجال الميكانيكي، فمثلا الاختيار المعتاد في نظم الميكانيكا الانتقالية هو القوة (F) والسرعة (u)؛ ولكنه ليس الاختيار الوحيد، كما تختلف زوج المتغيرات حسب اختلاف النظام الميكانيكي كنظم الميكانيكا الدورانية أو الميكانيكا الصوتية.[7]
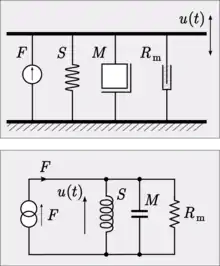
هناك طريقتان لاختيار متغيرات القدرة المترافقة، فعلى سبيل المثال يمكن تمثيل القوة F بالجهد v والسرعة u بالتيار i، ويمكن أيضًا استخدام التمثيل البديل وهو تمثيل السرعة u بالحهد v والقوة F بالتيار i، وهذان هما طريقتا التمثيل: تمثيل المعاوقة، وتمثيل القبولية.[8] فيمكن تمثيل نفس النظام الميكانيكي بدائرتين كهربائيتين مختلفتين، بحيث نجد أن كلا الدائرتين الكهربائيتين بينهما ازدواج، حيث تكون كلا منهما تعتبر الدائرة الثنائية أو المُزدَوجة بالنسبة للدائرة الأخرى.[9]
اختيار المتغيرات الهاملتونية
المتغيرات الهاملتونية وتُسمى أحيانًا متغيرات الطاقة هي المتغيرات التي تأتي عند الاشتقاق بالنسبة للزمن لمتغيرات القدرة المترافقة، سُميت المتغيرات الهاملتونية بهذا الاسم لأنها عادةً ما تظهر في الميكانيكا الهاملتونية، فمثلًا المتغيرات الهاملتونية في المجال الكهربائي هي الشحنة الكهربية (q) وتدفق الفيض المغناطيسي (λ)، لأنهما تعبران عن المشتقة الزمنية لمتغيرات القدرة المترافقة في المجال الكهربائي، حيث:


كما أن المتغيرات الهاملتونية في مجال الميكانيكا الانتقالية هي الإزاحة (x) كمية التحرك (p) لأنهما تعبران عن المشتقة الزمنية لمتغيرات القدرة المترافقة في مجال الميكانيكا الانتقالية، حيث:


وكذلك في المجالات الميكانيكية الأخرى، تُسمى المتغيرات الهاملتونية أيضا بمتغيرات الطاقة؛ لأنه عند حساب تكامل أحد متغيرات القدرة المترافقة بالنسبة للمتغير الهاملتوني يكون الناتج قيمة الطاقة. فعلى سبيل المثال:[10]
- و


أنواع التمثيلات
هناك طريقتان للتمثيل هما الأكثر استخدامًا: تمثيل المعاوقة (ويُسمى أيضًا تمثيل ماكسويل) والذي يحافظ على التناظر بين المجال الميكانيكي والكهربي؛ ولكنه لا يحافظ على الطبولوجيا أو البنية المادية بين الدائرتين، وتمثيل القبولية (ويُسمى أيضًا تمثيل فايرستون) والذي يحافظ على الطبولوجيا على حساب فقدان التناظر بين مجالات الطاقة المختلفة، وهناك طريقة تمثيل ثالثة وهي "تمثيل عبر وخلال" (ويُسمى أيضًا تمثيل ترينت). فتمثيل عبر وخلال يكون شبيهًا بتمثيل المعاوقة عند التحويل بين المجالين الكهربي والميكانيكي، ويكون شبيهًا بتمثيل القبولية عند التحويل بين المجال الكهربي ومجال الميكانيكا الصوتية خاصة "ميكانيكا الموائع"، حيث تكون العلاقة بين المجال الكهربي ومجال الميكانيكا الصوتية في "تمثيل عبر وخلال" بينهما علاقة ازدواج.[11]
تختلف المتغيرات الأساسية حسب النظام الميكانيكي: انتقالي أو دوراني، فعلى سبيل المثال المسافة الخطية هي متغير الإزاحة في الميكانيكا الانتقالية، ولكن في المكيانيكا الدورانية يتم استبدال الإزاحة بالزاوية، وكذلك الحال في الميكانيكا الصوتية وميكانيكا الموائع، حيث يتم التعامل معها كنظام طاقة مختلف له متغيراته الأساسية الخاصة به ذات الطابع الميكانيكي، ويستخدم التمثيل بين الأنظمة الثلاثة: الكهربية والميكانيكية والميكانيكا الصوتية لتمثيل أنظمة الصوت الكهروميكانيكية.[12]
تمثيل المعاوقة
في تمثيل المعاوقة أو تمثيل ماكسويل؛ يتم تصنيف متغيري القدرة المترافقة إلى متغير جهد ومتغير تدفق، حيث أن متغير الجهد في مجال طاقة معين هو المتغير المماثل للقوة في المجال الميكانيكي، ومتغير التدفق هو المتغير المماثل للسرعة في المجال الميكانيكي، حيث يتم اختيار المتغيرات المماثلة للقوة والسرعة في مجال الطاقة المقابل.[13][14]
أما في المجال الكهربائي؛ فإن متغير الجهد هو الجهد الكهربي، ومتغير التدفق هو التيار الكهربائي، والنسبة بين الجهد والتيار هي المقاومة الكهربائية (قانون أوم). وكذلك النسبة بين متغير الجهد ومتغير التدفق في أي مجال طاقة يمكن وصفها بأنها مقاومة، أما إذا كان هناك اختلاف في الطور بين الجهد والتيار تُسمى النسبة بينهما بالمعاوقة الكهربائية، فيمكن وصف المعاوقة بأنها الحالة العامة للمقاومة، حيث يرتبط مفهوم المقاومة بتبديد الطاقة؛ بينما يرتبط مفهوم المعاوقة بتخزين الطاقة وتبديدها أيضًا، إذَا فإن النسبة بين متغير الجهد ومتغير التدفق في أي مجال طاقة يمكن وصفها بأنها معاوقة (ولكنها تُقاس بوحدات مختلفة)، ومن هنا جاءت تسمية تمثيل المعاوقة. [13][15]
تمثيل المعاوقة - الميكانيكا الانتقالية
| النوع | المتغير الميكانيكي | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير الجهد | القوة | الجهد |
| متغير التدفق | السرعة | التيار | |
| اختيار المتغيرات الهاملتونية | متغير الجهد | كمية التحرك | تدفق الفيض المغناطيسي |
| متغير التدفق | الإزاحة | الشحنة | |
يصف تمثيل "المعاوقة - الميكانيكا الانتقالية" النظم الميكانيكية التي تتحرك في بعد خطي واحد، مما يثير مفهوم المعاوقة الميكانيكية؛ ووحدتها نيوتن.ثانية/متر أو كجم/ثانية.[16]
| الخاصية الميكانيكية | نظيرها الكهربي |
|---|---|
| التخميد | المقاومة |
| الكتلة | الحث |
| المطاوعة | السعة |
| المعاوقة الميكانيكية | المعاوقة الكهربية |
تمثيل المعاوقة - الميكانيكا الدورانية
| النوع | المتغير الميكانيكي | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير الجهد | عزم الدوران | الجهد |
| متغير التدفق | السرعة الزاويّة | التيار | |
| اختيار المتغيرات الهاملتونية | متغير الجهد | كمية الحركة الزاويّة | تدفق الفيض المغناطيسي |
| متغير التدفق | الزاوية | الشحنة | |
يصف تمثيل "المعاوقة - الميكانيكا الدورانية" النظم الميكانيكية التي تتحرك في حركة دورانية، مما يثير مفهوم المعاوقة الدورانية؛ ووحدتها نيوتن.متر.ثانية/راديان.[18]
| الخاصية الميكانيكية | نظيره الكهربي |
|---|---|
| مقاومة الدوران | المقاومة |
| عزم القصور الذاتي | الحث |
| قبولية الدوران | السعة |
| المعاوقة الميكانيكية | المعاوقة الكهربية |
تمثيل المعاوقة - الميكانيكا الصوتية
| النوع | المتغير في الميكانيكا الصوتية | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير الجهد | ضغط | الجهد |
| متغير التدفق | معدل التدفق الحجمي | التيار | |
| اختيار المتغيرات الهاملتونية | متغير الجهد | كمية التحرك الضغطي[معلومة 3] | تدفق الفيض المغناطيسي |
| متغير التدفق | الحجم | الشحنة | |
والمعاوقة الصوتية وحدتها نيوتن.ثانية/متر5.[19]
| الخاصية في الميكانيكا الصوتية | نظيرها الكهربي |
|---|---|
| المقاومة الصوتية | المقاومة |
| الكتلة الصوتية[معلومة 4] | الحث |
| القبولية الصوتية | السعة |
| المعاوقة الصوتية | المعاوقة الكهربية |
تمثيل القبولية
يعتبر تمثيل القبولية أو تمثيل فايرستون المقلوب الكهربائي لتمثيل المعاوقة، حيث يُمثَّل متغير الجهد في المجال الميكانيكي بالتيار الكهربائي (متغير التدفق في المجال الكهربائي)، ويُمثل متغير التدفق في المجال الميكانيكي بالجهد الكهربائي (متغير الجهد في المجال الكهربائي)، لذلك فإن الدائرة الكهربائية الناتجة عن تمثيل القبولية تعتبر مقلوب الدائرة الناتجة عن تمثيل المعاوقة.[21]
يوصف تمثيل القبولية بالقبولية الكهربية مثلما يوصف تمثيل المعاوقة بالمعاوقة الكهربية، حيث أن القبولية هي المقلوب الجبري للمعاوقة، ومن هنا جاءت تسمية تمثيل القبولية.[22]
تمثيل القبولية - الميكانيكا الانتقالية
| النوع | المتغير الميكانيكي | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير الجهد | القوة | التيار |
| متغير التدفق | السرعة | الجهد | |
| اختيار المتغيرات الهاملتونية | متغير الجهد | كمية التحرك | الشحنة |
| متغير التدفق | الإزاحة | تدفق الفيض المغناطيسي | |
| الخاصية الميكانيكية | نظيرها الكهربي |
|---|---|
| الاستجابة[معلومة 5] | المقاومة |
| الكتلة | السعة |
| المطاوعة | الحث |
| القبولية | المعاوقة الكهربية |
تمثيل القبولية - الميكانيكا الدورانية
| النوع | المتغير الميكانيكي | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير الجهد | عزم الدوران | التيار |
| متغير التدفق | السرعة الزاويّة | الجهد | |
| اختيار المتغيرات الهاملتونية | متغير الجهد | كمية التحرك الزاويّة | الشحنة |
| متغير التدفق | الزاوية | تدفق الفيض المغناطيسي | |
| الخاصية الميكانيكية | نظيرها الكهربي |
|---|---|
| الاستجابة الدورانية | المقاومة |
| عزم القصور الذاتي | السعة |
| المطاوعة الدورانية | الحث |
| القبولية الدورانية | المعاوقة الكهربية |
تمثيل القبولية - الميكانيكا الصوتية
| النوع | المتغير في الميكانيكا الصوتية | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير الجهد | الضغط | التيار |
| متغير التدفق | معدل تدفق الحجم | الجهد | |
| اختيار المتغيرات الهاملتونية | متغير الجهد | كمية التحرك الضغطي | الشحنة |
| متغير التدفق | الحجم | تدفق الفيض المغناطيسي | |
| الخاصية في الميكانيكا الصوتية | نظيرها الكهربي |
|---|---|
| التوصيلية الصوتية | المقاومة |
| الكتلة الصوتية | السعة |
| المطاوعة الصوتية | الحث |
| القبولية الصوتية | المعاوقة الكهربية |
تمثيل عبر وخلال
يُصنف "تمثيل عبر وخلال" أو "تمثيل ترينت" متغيري القدرة المترافقة إلى "متغير عبر" و"متغير خلال"، يظهر "متغير عبر" عبر طرفي العنصر، ويقاس بدلالة طرفي العنصر، أما "متغير خلال" يمر أو يتحرك خلال العنصر، ولديه نفس القيمة عند طرفي العنصر، فمثلا في المجال الكهربائي متغير عبر هو الجهد، ومتغير خلال هو التيار، وفي المجال الميكانيكي السرعة هي متغير عبر، والقوة هي متغير خلال، لذلك فإنه يتم تمثيل متغيرات المجال الميكانيكي (القوة والسرعة) كما في تمثيل القبولية.[26][27][28]
تمثيل عبر وخلال - الميكانيكا الانتقالية
| النوع | المتغير الميكانيكي | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير عبر | السرعة | الجهد |
| متغير خلال | القوة | التيار | |
| اختيار المتغيرات الهاملتونية | متغير عبر | الإزاحة | تدفق الفيض المغناطيسي |
| متغير خلال | كمية التحرك | الشحنة | |
تمثيل عبر وخلال - الميكانيكا الدورانية
| النوع | المتغير الميكانيكي | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير عبر | السرعة الزاويّة | الجهد |
| متغير خلال | عزم الدوران | التيار | |
| اختيار المتغيرات الهاملتونية | متغير عبر | الزاوية | تدفق الفيض المغناطيسي |
| متغير خلال | كمية التحرك الدورانية | الشحنة | |
تمثيل عبر وخلال - الميكانيكا الصوتية
| النوع | المتغير في الميكانيكا الصوتية | نظيره الكهربي | |
|---|---|---|---|
| اختيار متغيرات القدرة المترافقة | متغير عبر | الضغط | الجهد |
| متغير خلال | معدل تدفق الحجم | التيار | |
| اختيار المتغيرات الهاملتونية | متغير عبر | كمية التحرك الضغطي | تدفق الفيض المغناطيسي |
| متغير خلال | الحجم | الشحنة | |
الضغط هو متغير عبر؛ بسبب أن الضغط يتم قياسه بالنسبة إلى طرفي العنصر، وفهو ليس قيمة مطلقة للضغط، وبالتالي لا يتم تمثيله بالقوة لأنها متغير خلال؛ على الرغم من أن الضغط هو القوة مقسومة على المساحة، لذلك يتشابه تمثيل عبر وخلال مع تمثيل القبولية عند التمثيل بين المجال الكهربي والمجال الميكانيكي؛ بينما يتشابه مع تمثيل المعاوقة عند التمثيل بين المجال الكهربي والميكانيكا الصوتية.[26][29]
مجالات الطاقة الأخرى
ويمكن أن يمتد التمثيل الكهربي لمجالات الطاقة الأخرى، كما أن هذا الأمر مطلوب كما في مجال المستشعرات والمشغلات، وفي مجال هندسة التحكم عمومًا، حيث أن أجهزة الاستشعار تقيس المتغيرات في أي مجال طاقة، لذلك التمثيل بين مجالات الطاقة المختلفة مطلوب، الجدول التالي يلخص متغيرات القدرة المترافقة الأكثر شيوعا لتكوين التمثيلات المختلفة.
| مجال الطاقة | متغير الجهد | متغير التدفق |
|---|---|---|
| الكهربي | الجهد | التيار |
| الميكانيكي | القوة | السرعة |
| ميكانيكا الموائع | الضغط | معدل تدفق الحجم |
| الحراري | فرق درجات الحرارة | معدل تدفق الإنتروبيا |
| المغناطيسي | القوة المحركة المغناطيسية (ق.م.م) | التغير في معدل تدفق الفيض المغناطيسي |
| الكميائي | الجهد الكيميائي | معدل تدفق المولات |
ربما يكون الأكثر شيوعًا في المجال الحراري هو اختيار درجة الحرارة والقدرة الحرارية باعتبارهما المتغيرين الأساسيين، لأنهما يمكن قياسهما بسهولة على عكس الإنتروبيا، ولكنهما ليسا من منغيرات القدرة المترافقة، لذلك عند التمثيل الكهربي لعدة مجالات طاقة مختلفة مع بعضها البعض؛ فإن تمثيل المجال الحراري لا يمثل بشكل صحيح تدفق الطاقة.[8][30]
وبالمثل في المجال المغناطيسي، الشائع اختيار القوة المحركة المغناطيسية (ق.م.م) والفيض المغناطيسي باعتبارهما المتغيرين الأساسيين، ولكن هذا التمثيل لا يمثل بشكل صحيح تدفق الطاقة، كما أنهما ليسا من منغيرات القدرة المترافقة، يُسمى هذا النموذج أحيانًا "نموذج الممانعة - المقاومة"، أما التمثيل المستخدم في الجدول أعلاه - والذي يستخدم متغيري القدرة المترافقة - يُسمى أحيانًا "نموذج المكثف - الملف".[32]
محولات الطاقة
محول الطاقة هو جهاز يدخل إليه كمية من مجال طاقة معين ليحولها إلى مجال طاقة آخر، لمحولات الطاقة استخدامات عديدة وأنواع كثيرة، ففي مجال الأنظمة الكهروميكانيكية تتكون من المستشعرات والمشغلات، وفي مجال الإلكترونيات الصوتية تُستخدم لتحويل الطاقة الكهربية إلى صوتية، تعتبر المحولات حلقة الوصل بين المجالات الكهربية والميكانيكية، لذلك نحتاج التمثيل الكهربي الميكانيكي لتطوير المحولات.[33][34]
محولات الطاقة لها منفذين (على الأقل[معلومة 6])، منفذ خاص بالمجال الميكانيكي، وآخر خاص بالمجال الكهربي، لذلك فيتم تمثيله على شكل شبكة كهربية ذات منفذين (two-port)، وهذا على عكس ما تم مناقشته أعلاه؛ حيث كانت جميع العناصر تتكون من منفذ واحد، يمكن تمثيل الشبكة الكهربية ذات منفذين بمصفوفة 2×2 (أو ما يكافؤها) تتكون من اثنين من مصادر التابعة (سواء كانت مصادر الجهد أو التيار) واثنين من المعاوقات (أو المسامحات).[35]
التاريخ
يرجع الفضل إلى جيمس كليرك ماكسويل في تطوير نظرية التمثيلات الكهربية الميكانيكية، حيث كان أول قام بربط القوة الميكانيكية بالجهد الكهربي عام 1873 وبالتالي فيرجع له الفضل في تأسيس تمثيل المعاوقة،[36][37] وهو أول التمثيلات الكهربية الميكانيكية.[38] وبالرغم من أن مصطلح المعاوقة لم يتم صياغته إلا في سنة 1886، أي بعد وفاة ماكسويل؛ حيث صاغه أوليفر هيفسايد،[39] ثم تم صياغة مصطلح المعاوقة المركَّبة من قبل آرثر كينيلي في عام 1893، ثم تم صياغة مفهوم المعاوقة الميكانيكية في عام 1920 من قبل كينيلي وآرثر غوردون ويبستر.[40]
لم يكن غرض ماكسويل تمثيل الأنظمة الميكانيكية بالأنظمة الكهربائية، ولكن كان هدفه فهم وشرح الظواهر الكهربية بطريقة أقرب للعقل عن طريق تشبيهها بالأنظمة الميكانيكية، وبعد أن أصبحت الظواهر الكهربية مفهومة بشكل أفضل؛ حدث العكس، فأصبحت التمثيلات الكهربية تستخدم لوصف الأنظمة الميكانيكية، وأصبح ذلك الأكثر شيوعًا، ثم وُجِد أن تمثيل الكهربي الميكانيكي يمكنه حل العديد من المشاكل في المجال الميكانيكي ومجالات الطاقة الأخرى، وفي عام 1900 أصبحت التمثيلات الكهربية الميكانيكية مألوفة. وفي عام 1920 تقريبًا أصبح التمثيل الكهربي أداة تحليل أساسية، وقام فانيفار بوش بتطوير نموذج الحاسوب التماثلي وعرضت هذه الطريقة في ورقة بحثية لكليفورد نيكل عام 1925.[41]
في عام 1933، قام فلويد فايرستون باقتراح تمثيل جديد وهو تمثيل القبولية، والذي قام فيه بتمثيل القوة الميكانيكية بالتيار الكهربي بدلا من الجهد الكهربي،[42][38] كما قد فايرستون مفهوم "متغيرات عبر وخلال" في نفس الوقة البحثية، وعرض فكرة توسيع التمثيل ليشمل مجالات الطاقة الأخرى، وفي عام 1955، قدم هوراس ترينت ما يُعرف بـ "تمثيل عبر وخلال".[8][43]
انظر أيضًا
هوامش
- Busch-Vishniac 1999، صفحة 17
- Darlington 1984، صفحة 7
- Care 2010، صفحة 74-77
- Chan 1997، صفحة 2-3
- Busch-Vishniac 1999، صفحة 17-18
- Busch-Vishniac 1999، صفحة 18-21
- Busch-Vishniac 1999، صفحة 18-19
- Busch-Vishniac 1999، صفحة 19
- Eargle 2003، صفحة 5
- Busch-Vishniac 1999، صفحة 21
- Busch-Vishniac 1999، صفحة 18-20
- Kleiner 2013، صفحة 67-68
- Busch-Vishniac 1999، صفحة 18
- Borutzsky, pp. 22-23
- de Silva 2006، صفحة 132
- Kleiner 2013، صفحة 15
- Eargle 2003، صفحة 4
- Beranek & Mellow 2012، صفحة 194
- Kleiner 2013، صفحة 84
- Kleiner 2013، صفحة 85-90
- Eargle 2003، صفحة 4-5
- Kleiner 2013، صفحة 70
- Busch-Vishniac 1999، صفحة 18-19,21
- Busch-Vishniac 1999، صفحة 19,21
- Lurie & Enright 2011، صفحة 233
- Busch-Vishniac 1999، صفحة 19-20
- Jackson 2004، صفحة 17
- Regtien 2012، صفحة 20
- de Silva 2006، صفحة 132-133
- Regtien 2012، صفحة 21
- Borutzsky, p. 27
- Hamill، صفحة 97
- Busch-Vishniac 1999، صفحة 11-12
- Janschek 2011، صفحة 94
- Lenk & Ballas & Roland 2010، صفحة 207-208
- Bishop 2005، صفحة 8.4
- Busch-Vishniac 1999، صفحة 20
- Smith 2002، صفحة 1648
- Martinsen & Grimnes 2011، صفحة 287
- Hunt 1954، صفحة 66
- Care 2010، صفحة 76
- Bishop 2005، صفحة 8.2
- Bishop 2005، صفحة 8.8
ملاحظات
- مجالات الطاقة هي الأنظمة التي تكون فيها الطاقة والقوة تنتمي إلى نوع معين مثل الطاقة الكهربية، والميكانيكية، والصوتية، والحرارية، إلخ.
- يمكن إضافة عناصر نشطة أخرى غير المذكورة مثل: الترانزستور.
- كمية التحرك الضغطي هو مصطلح تم ابتكاره بواسطة بوش-فشنياك،
- كتلة المائع أو "الكتلة الصوتية" لا تقاس بوحدة الكتلة، ولكن وحدتها في نظام الوحدات الدولي هي كجم/م4 (Barron، صـ 333)
- الاستجابة هي مقلوب المقاومة الميكانيكية. (Seely، صـ 200)
- محولات الطاقة الكهروضغطية تتكون من ثلاث منافذ، منفذ للمجال الكهربي ومنفذين للمجال الميكانيكي. (Cheeke، صـ 213-214).
المراجع
- Agarwal & Lang, Agarwal, Anant; Lang, Jeffrey (2005). Foundations of Analog and Digital Electronic Circuits. Morgan Kaufmann. ISBN 008050681X. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Barron, Randall F. (2002). Industrial Noise Control and Acoustics. CRC Press. ISBN 0203910087. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Beranek & Mellow, Beranek, Leo Leroy; Mellow, Tim J. (2012). Acoustics: Sound Fields and Transducers. Academic Press. ISBN 0123914213. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Bishop, Robert H. (2005). Mechatronics: An Introduction. CRC Press. ISBN 1420037242. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Borutzky, Wolfgang (2009). Bond Graph Methodology. Springer. ISBN 1848828829. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Busch-Vishniac, Ilene J. (1999). Electromechanical Sensors and Actuators. Springer Science & Business Media. ISBN 038798495X. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Care, Charles (2010). Technology for Modelling: Electrical Analogies, Engineering Practice, and the Development of Analogue Computing. Springer. ISBN 1848829485. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Carr, Joseph J. (2002). RF Components and Circuits. Newnes. ISBN 0-7506-4844-9. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Chan, Shu-Park (1997). Circuits: Introduction, pp.2–4, in Dorf, Richard C. (ed), The Electrical Engineering Handbook. CRC Press. ISBN 1420049763. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Cheeke, David N. (2012). Fundamentals and Applications of Ultrasonic Waves. CRC Press. ISBN 143985498X. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Darlington, S. (1984). A history of network synthesis and filter theory for circuits composed of resistors, inductors, and capacitors, vol. 31, no. 1, pp. 3–13. IEEE Transactions on Circuits and Systems. مؤرشف من الأصل في 20 أغسطس 2020. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) - de Silva, Clarence W. (2006). Vibration: Fundamentals and Practice. CRC Press. ISBN 0849319870. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Eargle, John (2003). Loudspeaker Handbook. Kluwer Academic Publishers. ISBN 1402075847. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Firestone, Floyd (1933). A new analogy between mechanical and electrical system elements, vol. 3, pp.249–267. The Journal of the Acoustical Society of America. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) - Froehlich & Fritz, Froehlich, Fritz E.; Kent, Allen (1991). The Froehlich/Kent Encyclopedia of Telecommunications. CRC Press. ISBN 0824729021. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Froehlich & Fritz, Froehlich, Fritz E.; Kent, Allen (1991). The Froehlich/Kent Encyclopedia of Telecommunications. CRC Press. ISBN 0824729021. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Fukazawa & Tanaka, Fukazawa, Tatsuya; Tanaka, Yasuo (1993). Evoked otoacoustic emissions in a cochlear model, pp. 191–196 in Hohmann, D. (ed), ECoG, OAE and Intraoperative Monitoring: Proceedings of the First International Conference, Würzburg, Germany, September 20–24, 1992. Kugler Publications. ISBN 9062990975. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Hamill, David C. Lumped equivalent circuits of magnetic components: the gyrator-capacitor approach, vol. 8, iss. 2, pp.97–103. IEEE Transactions on Power Electronics. مؤرشف من الأصل في 13 فبراير 2015. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) - Hunt, Frederick V. (1954). Electroacoustics: the Analysis of Transduction, and its Historical Background. Harvard University Press. OCLC 2042530. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) - Jackson, Roger G. (2004). Novel Sensors and Sensing. CRC Press. ISBN 1420033808. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Janschek, Klaus (2011). Mechatronic Systems Design. Springer. ISBN 3642175317. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Joines & Palmer & Bernhard, Joines, William T.; Palmer, W. Devereux; Bernhard, Jennifer T. (2013). Microwave Transmission Line Circuits. Artech House. ISBN 1608075699. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Kleiner, Mendel (2013). Electroacoustics. CRC Press. ISBN 1439836183. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Lenk & Ballas & Roland, Lenk, Arno; G. Ballas, Rüdiger; Werthschützky, Roland; Pfeifer, Günther (2010). Electromechanical Systems in Microtechnology and Mechatronics. Springer. ISBN 3642108067. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Lurie & Enright, Lurie, Boris; Enright, Paul (2011). Classical Feedback Control. CRC Press. ISBN 1439860173. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Martinsen & Grimnes, Martinsen, Orjan G.; Grimnes, Sverre (2011). Bioimpedance and Bioelectricity Basics. Academic Press. ISBN 0080568807. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Myers, Rusty L. (2006). The Basics of Physics. Greenwood Publishing Group. ISBN 0313328579. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Paynter, Henry M. (1961). Analysis and Design of Engineering Systems. MIT Press. OCLC 1670711. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) - Radmanesh, Matthew M. (2011). Electronic Waves & Transmission Line Circuit Design. Author House. ISBN 1456752324. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Regtien, Paul P. L. (2012). Sensors for Mechatronics. Elsevier. ISBN 0123944090. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Seely & Tarnoff & Holstein, Seely, Samuel; Tarnoff, Norman H.; Holstein, David (1970). Digital Computers in Engineering. Holt, Rinehart and Winston. OCLC 92614. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) - Semmlow, John (2012). Signals and Systems for Bioengineers. Academic Press. ISBN 0123849829. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Sen, S. N. (1990). Acoustics, Waves and Oscillations. New Age International. ISBN 8122402666. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - White, Curt (2012). Data Communications and Computer Networks. Cengage Learning. ISBN 1285225864. الوسيط
|CitationClass=تم تجاهله (مساعدة)CS1 maint: ref=harv (link) صيانة CS1: تجاهل خطأ ردمك (link) - Smith, Malcom C., "Synthesis of mechanical networks: the inerter", IEEE Transactions on Automatic Control, vol. 47, iss. 10, pp. 1648–1662, October 2002.
- Trent, Horace M., "Isomorphisms between oriented linear graphs and lumped physical systems", The Journal of the Acoustical Society of America, vol. 27, pp. 500–526, 1955.
 بوابة إلكترونيات
بوابة إلكترونيات بوابة كهرباء
بوابة كهرباء بوابة هندسة تطبيقية
بوابة هندسة تطبيقية بوابة هندسة ميكانيكية
بوابة هندسة ميكانيكية