تعليم معزز
التعليم المعزز (reinforcement learning) هو مجال من مجالات التعليم الآلي يختص بكيفية جعل الوكيل المُبرمَج يتخذ القرار (الاختيار) في بيئة من أجل تعظيم المكافأة الكلية. التعليم المعزز هو أحد فروع التعليم الآلى الثلاثة بجانب التعليم المراقب وغير المراقب.
يختلف التعليم المعزز عن التعليم المراقب بأنه لا يحتاج إلى أي أزواج من المدخلات والمخرجات، ولا يحتاج إلى تصحيح القرارات (الاختيارات) غير المثالية بشكل مباشر. عوضًا عن ذلك، يتم التركيز على الأداء المباشر، الذي ينطوي على إيجاد توازن بين الاستكشاف (للفضاء غير المجهول) و الاستغلال (للمعرفة الحالية).
في مجال تعليم الآلة، عادة ما تصاغ البيئة كـعملية ماركوف لاتخاذ القرار (MDP) ، كما أن العديد من خوارزميات التعليم المعزز في هذا السياق تستخدم تقنيات البرمجة الديناميكية. الفرق الرئيسي بين الأساليب التقليدية للبرمجة الديناميكية وخوارزميات التعليم المعزز في هو أن الأخير لا يفترض الكثير من المعلومات عن الMDP، كما أنه يستطيع استهداف الMDP الكبيرة جدًا التي يصعب بها تطبيق الأساليب الدقيقة exact methods.
مقدمة
التعليم المعزز مستوحى من علم النفس السلوكي، يعنى بكيفية اختيار الوكلاء البرمجيين للإجراءات في بيئة ما بشكل يحقق أقصى قدر لمفهوم ما من المكافأة. المشكلة، نظرا لعمومها، تدرس في العديد من التخصصات الأخرى مثل نظرية الألعاب، نظرية التحكم، بحوث العمليات، نظرية المعلومات، الاستمثال المحاكي، الأنظمة متعددة الوكلاء، ذكاء السرب، الإحصائيات و الخوارزميات الجينية. في بحوث العمليات والتحكم، يسمى المجال الذي تدرس به أساليب التعليم المعزز البرمجة الديناميكية التقريبية. كما يتم دراسة نفس المشكلة في مجال نظرية التحكم الأمثل، رغم أن معظم الدراسات هذا المجال معنية بوجود الحلول المثلى ووصفها، وليس بجوانب التعلم أو التقريب. في الاقتصاد و نظرية الألعاب، يمكن استخدام التعليم المعزز لشرح كيفية إمكان نشأة حالة توازن في إطار عقلانية محدودة. وهو يعتبر إحدى فروع التعليم الآلى إلى جانب التعليم المراقب وغير المراقب.
نموذج بسيط لللتعليم المعزز باستخدام عملية ماركوف لاتخاذ القرار يكون على شكل:
- مجموعة من حالات البيئة والوكيل A
- مجموعة من القرارات (الاختيارات) S
- هو احتمال الانتقال من الحالة s إلى الحالة s' عبر الإجراء a.
- هو المكافأة الفورية (المتوقعة) بعد الانتقال من s إلى عبر الإجراء a.
غالبا ما تكون القواعد عشوائية. الرصد عادة ينطوي على المكافأة الفورية المرتبطة بآخر انتقال. في العديد من التطبيقات، يُفترض أن الوكيل يرصد الحالة البيئية الحالية (ما يسمى الرصد الكامل). إذا لم يكن كذلك فيقال أن لدى الوكيل رصد جزئي. في بعض الأحيان، مجموعة الإجراءات المتاحة للوكيل قد تكون مقيدة.
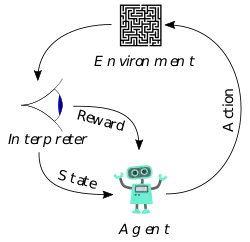
يتفاعل وكيل التعليم المعزز مع بيئته في خطوات زمنية منفصلة. في كل زمن t، يتلقى الوكيل رصدًا عادة ما يشمل مكافأة . ثم يختار الوكيل إجراءًا من مجموعة الإجراءات المتاحة، والذي يتم إرساله إلى البيئة. تنتقل البيئة بعد ذلك إلى حالة جديدة ويتم التحديد المكافأة المرتبطة بالانتقال . هدف الوكيل في التعليم المعزز هو جمع أكبر قدر من المكافأة. بإمكان الوكيل اختيار إجرائه كدالة لتاريخه أو حتى بطريقة عشوائية.
حين يقارن أداء الوكيل بأداء وكيل يعمل بطريقة مثالية، فإن الفرق في الأداء يؤدي إلى مفهوم الأسف. من أجل العمل بقرب من المثالية، على الوكيل الاحتساب للعواقب طويلة المدى لإجراءاته، ولو أدى ذلك إلى مكافأة فورية سالبة.
إذًا، فإن التعليم المعزز مناسب بشكل خاص للبيئات التي تشمل مفاضلة بين المكافأة على المدى الطويل مقابل المدى القصير. وقد تم تطبيقه بنجاح لحل العديد من المسائل، بما فيها التحكم بالروبوت، جدولة المصاعد، الاتصالات السلكية واللاسلكية، لعبة الطاولة، لعبة الداما[1]ولعبة غو الصينية (AlphaGo).
عاملان يجعلان التعليم المعزز أسلوبًا ناجحًا: استخدام العينات لتحسين الأداء واستخدام التقريب للتعامل مع البيئات كبيرة. بفضل هذين العنصريين، فإن التعليم المعزز يمكن استخدامه في بيئات كبيرة في الحالات التالية:
- نموذج البيئة معروف، ولكن الحل تحليلي غير متاح؛
- لا يعرف إلا نموذج محاكٍ البيئة؛[2]
- الطريقة الوحيدة لجمع المعلومات عن البيئة هو التفاعل معها.
أولى اثنتين من هذه الحالات يمكن اعتبارها مسائل تخطيط (لأن النموذج متاح بشكل ما) ، بينما الحالة الأخيرة بالإمكان اعتبارها مسألة تعليم فعليّة. ولكن، تحت إطار منهجية التعليم المعزز فإن كلتي مسائل التخطيط يتم تحويلها إلى مسائل التعليم الآلي.
الاستكشاف
المفاضلة بين الاستفادة (الاستغلال) من الحالة الحالية أو الأستكشاف دُرست بشكل مفصل في التعليم المعزز من خلال مشكلة الأذرع المتعدة multi-armed bandit. يحتاج التعليم المعزز أسلوب ذكى لتحديد الكم من الإستكشاف، حيث أن اختيار الخيارات actions عشوائيا ينتج عنه أداء ضعيف.
أحد هذه الطرق الشهيرة هي طريقة ايبسلون-جشع (وهي تعنى دوماً اختيار أفضل حل في كل مرة مع بعض العشوائية بقيمة ايبسلون -قيمة صغيرة). حيث دوما ايبسلون قيمتها تتراوح ما بين الصفر والواحد، ويولد رقم عشوائى عندما يكون أكبر من ال يُختار الأختيار الطبيعى (الأكبر) وعندما يكون الرقم المُولد العشوائى أصغر من يُختار أختيار عشوائى كنوع من الاستكشاف.

مقارنة بين خورازميات التعليم المعزز
| الخوارزم | الوصف | إعتماده على نموذج | الخطة المتبعة | فضاء الخيارات | فضاء الحالات | الدالة الأساسية |
|---|---|---|---|---|---|---|
| مونت كارلو Monte Carlo | يعمل بكل زيارة في دورة مونت-كارلو | لا يعتمد | يعمل في الحالتين | متقطع | متقطع | متوسط العينة |
| تعلم الدالة ق Q-learning | حالة-خيار-مكافأة-حالة | لا يعتمد | لا يعتمد على خطة | متقطع | متقطع | قيمة ق Q-value |
| SARSA | حالة-خيار-مكافأة-حالة-اختيار | لا يعتمد | يعتمد على خطة | متقطع | متقطع | قيمة ق Q-value |
التعليم المعزز العميق
تستخدم هذه الخوارزميات المفاهيم الأساسية للتعليم المعزز بدمجها مع الشبكات العصبيية لتكون deep reinforcement learning وذلك في حالة كبر فضاء الحالة state space وصعوبة تمثيله بالطرق التقليدية.
التعليم المعزز العكسى
في هذا المجال لا يعطى الوكيل دالة المكافأة مباشرة وانما يشاهد الطرق الصحيحة لفعل هذا العمل والمكافأة التي يحصل عليها. ثم عليه أن يحاكى (يتعلم) من المشاهدات تلك ما هي الخيار الصحيح للحصول على المكافأة السليمة.
 بوابة علم الحاسوب
بوابة علم الحاسوب بوابة روبوتيات
بوابة روبوتيات
 صور وملفات صوتية من كومنز
صور وملفات صوتية من كومنز
