سرعة زاوية
في الفيزياء، السرعة الزاوية هي متجهة التي تعبر عن التردد الزاوي والمحور الذي يدور حوله الجسم.[1][2][3] وحدة قياس السرعة الزاوية في نظام الوحدات الدولي هي الراديان/ثانية ، ومن الممكن قياسها بواحدات أخرى مثل درجة في الثانية. عندما تُقاس بوحدة دورة في وحدة الزمن (دورة في الدقيقة، أو دورة في الساعة...الخ) فإنه يطلق عليها اسم السرعة الدورانية.
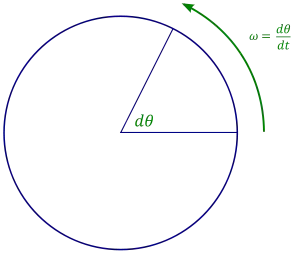
يُرمز للسرعة الزاوية بالحرف أوميغا (Ω أو ω). جهة متجهة السرعة الزاوية تكون عمودية على مستوي الدوران، والتي تـُحدد غالباً باستخدام قاعدة اليد اليمنى.
الصيغة الرياضية
نفترض حالة حركة دائرية فتكون السرعة الزاوية' ، أي معدل تغير الزاوية مع الزمن :

ومنه نحصل على زمن الدورة T الواحدة :

وتبلغ سرعة نقطة على دائرة دوران ذات نصف قطر :



ويبلغ عدد الدورات في الثانية :

في الحركة الاهتزازية يمثل التردد عدد الاهتازات الكاملة (الدورات) في وحدة الزمن. وفي كل دورة يتغير مسقط المطال طبقا لدالة جيبية ويعبر زاوية قدرها .


من ذلك يمكننا حساب التردد الزاوي :

وتناظر صيغة التردد صيغة عدد الدورات :

هذه المعادلة تبين العلاقة بين التردد f والسرعة الزاوية . ويقاس التردد هرتز أو 1/ثانية، أما السرعة الزاوية فهي تقاس ب راديان/ثانية.

| سرعة زاوية | |
|---|---|
الرموز الشائعة | ω |
| حسب الوحدات الدولية الأساسية | s−1 |
| التحليل البعدي | wikidata |
| كمية شمولية؟ | yes |
| كمية مكثفة؟ | yes (for rigid body only) |
الاشتقاق من كميات أخرى | ω = dθ / dt |
موتر
متجهة السرعة الزاوية يمكن التعبير عنها بالتساوي على أنها موتر (Tensor) السرعة الزاوية، المصفوفة (أو الخريطة الخطية) (W = W(t تعطى على الشكل التالي:

- هذه مصفوفة دوران متناهية الصغر. المصفوفة W تتصرف ك :



الحساب من مصفوفة الاتجاه
الخضوع لحركة دائرية منتظمة حول محور ثابت يستوفي:

بالنظر إلى مصفوفة التوجه (A(t لإطار، أعمدتها هي متجهات متعامدة متحركة ذات إحداثيات ، يمكننا الحصول على موتر السرعة الزاوية (W(t كالتالي: يجب أن تكون السرعة الزاوية هي نفسها بالنسبة إلى المتجهات الثلاثة لذلك بعد ترتيب المعادلات المتجهية الثلاثة في أعمدة مصفوفة، لدينا:


(هذا حتى لو (A(t لا تدور بشكل موحد). لذلك موتر السرعة الزاوية هو:


بحيث معكوس المصفوفة المتعامدة، هو منقولها .


خصائص
عامة، السرعة الزاوية في فضاء ذو أبعاد n) n: عدد الأبعاد) هو المشتق الزمني لموتّر الإزاحة الزاوية، وهو موتر متماثل منحرف من المرتبة الثانية.
هذا الموتر W سيكون لديه n(n−1)/2 عناصر مستقلة، وهو بُعد جبر لي (Lie Algebra) من مجموعة لي (Lie Group) ذات تناوب مساحة المنتج الداخلية ذات الأبعاد n.[4]
الازدواجية فيما يتعلق بمتجهة السرعة
في ثلاثة أبعاد، السرعة الزاوية يمكن تمثيلها بواسطة متجهة زائفة (pseudovector) لأن الموترات من الرتبة الثانية مزدوجة بالنسبة إلى المتجهات الزائفة (pseudovectors ) في ثلاثة أبعاد. حيث أن متوتر السرعة الزاوية (W=W(t عبارة عن مصفوفة منحرفة متماثلة:

إنها مزدوجة هودج وهي متجهة، وهي بالضبط متجهة السرعة الزاوية السابقة

أُسية W
إذا عرفنا الإطار الأولي (A(0 ولدينا سرعة موتر زاوية ثابتة W، يمكننا الحصول على (A(t لأي زمن t. نذكر معادلة المصفوفة التفاضلية:
يمكن حساب تكامل هذه المعادلة لتعطينا:

مما يدل على وجود صلة مع مجموعة لي من الدورات.
W منحرف متماثل
نثبت أن موتر السرعة الزاوية هو انحراف متماثل، يعني لتعطينا .


إن مصفوفة الدوران A متعامدة، عكس منقولها، إذا لدينا . لكل إطار مصفوفة . إزالة مشتق الزمن من المعادلة يعطينا:


.

بتطبيق المعادلة .

.

وبالتالي W هو سلبي بالنسبة لمنقوله ، مما يعني أنه منحرف متماثل.
وصف خالٍ من الإحداثيات
في أي لحظة t، موتر السرعة الزاوية يمثل خريطة خطية بين موضع المتجهة (r(t وسرعة المتجهات (v(t لنقطة على جسم صلب تدور حول الأصل:العلاقة بين هذه الخريطة الخطية ومتجهة السرعة الزاوية الزائفة هي كالتالي.


لأن w هو مشتق التحول المتعامد (orthogonal transformation)، الشكل الخطي:

هو منحرف متماثل. وبالتالي يمكننا تطبيق حقيقة الجبر الخارجي بأن هناك شكلًا خطيًا فريدًا ل حيث:



حيث أن هو الناتج الخارجي ل و



نأخذ ♯L لـ L تعطينا:

نعطي ، كمزدوجة هودج (Hodge dual) لـ ♯L وبتطبيق تعريف مزدوجة هودج مرتين بافتراض أن الوحدة المفضلة ل 3 متجهات هو



بحيث: حسب التعريف.

لأن متجهة اختيارية، من عدم انحلال للجداء العددي بالتالي:

السرعة الزاوية كمجال متجهي
بما أن موتر سرعة الدوران الزاوية لجسم صلب (في إطارها الإفتراضي). هو تحويل خطي يضع المواضع على السرعات (داخل الجسم الصلب)، يمكن اعتبارها مجال متجهي ثابت، على وجه الخصوص ، السرعة الزاوية لللف (الغزل) هي مجال متجهي قاتل ينتمي إلى عنصر من عناصر جبر لي (SO(3 لمجموعة الدوران ثلاثية الأبعاد (SO(3.
أيضًا ، يمكن إثبات أن المجال المتجهي للسرعة الزاوية الدورانية هو بالضبط نصف دوران مجال متجه السرعة الخطية (v(r لجسم صلب، بالأرقام:

مراجع
- K.S.HEDRIH: Leonhard Euler (1707–1783) and rigid body dynamics نسخة محفوظة 06 ديسمبر 2016 على موقع واي باك مشين.
- Hibbeler, Russell C. (2009). Engineering Mechanics. Upper Saddle River, New Jersey: Pearson Prentice Hall. صفحات 314, 153. ISBN 978-0-13-607791-6. مؤرشف من الأصل في 08 ديسمبر 2019. الوسيط
|CitationClass=تم تجاهله (مساعدة) - "online tool to calculate angular speed vectors". Aeroengineering.info. مؤرشف من الأصل في 05 مارس 2016. اطلع عليه بتاريخ 23 يناير 2013. الوسيط
|CitationClass=تم تجاهله (مساعدة); تحقق من التاريخ في:|تاريخ أرشيف=(مساعدة) - Rotations and Angular Momentum on the Classical Mechanics page of the website of John Baez, especially Questions 1 and 2. نسخة محفوظة 2020-11-25 على موقع واي باك مشين.
 بوابة رياضيات
بوابة رياضيات بوابة الفيزياء
بوابة الفيزياء بوابة ميكانيكا الكم
بوابة ميكانيكا الكم