المستقبل في نظام الملاحة (الأقمار الصناعية)
المستقبل في نظام الملاحة والحديث هنا عن استقبال الإشارات من الأقمار الصناعية كإشارات نظام ال GPS الأمريكي أو نظام غلوناس الروسي، يتكون من ثلاثة وحدات رئيسية:
- الواجهة الأمامية
- معالج الإشارات
- معالج معلومات الملاحة
الواجهة الأمامية
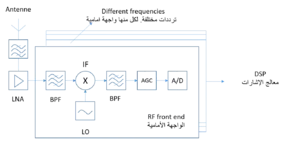
بالإنجليزية (HF Front End) هو الجزء الصلب (hardware) من المستقبل ومربوط بشكل مباشر باللاقط (الهوائي) الذي يتلقى إشارات القمر الصناعي.
عندما يتم لقط الإشارة عن طريق الهوائي فإن أول شيء يتم فعله هو ترشيح الإشارة عن طريق استخدام مرشح تمرير النطاق (بالانجليزية:BPF-Band Pass Filter) و كون الإشارة الواصلة من القمر الصناعي الذي يبعد تقريبا 20000 كم عن سطح الأرض ضعيفة و معدل نقل البيانات قليل جداً(30 bit في الثانية) فلا بد من تقوية الإشارة بعدها ترشيحها مما علق بها من عوامل غير مرغوب فيها وتقويتها باستخدام مقوي إشارات (بالانجليزية: LNA-Low Noise Amplifier) حتى يتمكن المستقبل من الاستفادة من المعلومات المرسلة (عن مواقع الأقمار الصناعية وعن الوقت الذي تم فيه الإرسال وغير ذلك من المعلومات الإضافية) و يقوم بناءً على ذلك بتحديد موقعة بالسرعة الضرورية.
معالج الإشارات
بالانجليزية (Signal Processor) و وظيفته حساب المسافة الأولية (Pseudo Ranges) بين المستقبل والقمر الصناعي عن طريق حساب الكود (PN-Code) و زاوية حامل الإشارة (Carrier Phase)، هذه المعلومات تعتبر المدخل للرررررير من المستقبل.
كل أجهزة الاستقبال يكون قد خزن فيها الكود الذي ترسله الأقمار الصناعية ولكن المهم هو إيجاده في الإشارة الضعيفة (قبل التقوية) المستقبلة وعمل تطابق في الإستقبال.
يحتوي المعالج على ثلاث بيانات (pn-codes):
- متقدم:early
- حالي:prompt
- متأخر:late
خلال البحث (acquisition)يتم عمل ترابط تلقائي بين الإشارات الثلاثة المخزنة والإشارة المتلقطة عن طريق مقارنة البيات مع بعضها البعض.القيمة القصوى لاقتران الترابط التلقائي تكون عندما يتم التطابق (auto correlation) و تكون عند الجزء ال"حالي" من البيانات.
بعد إيجاد الإشارة وهذه هي المهمة الأصعب، لا بد من القيام بتتبعها (Tracking) باستمرار.
معالج معلومات الملاحة
بالانجليزية (Navigation Processor) و فيه يتم حساب المكان (الذي يتواجد فيه المستقبل)، السرعة والزمن. بإمكان المعالج تزويد معالج الإشارة أيضا بمعلومات تساعده على الحساب في فترة أقصر.
 بوابة كهرباء
بوابة كهرباء بوابة إلكترونيات
بوابة إلكترونيات بوابة تقانة
بوابة تقانة بوابة اتصال عن بعد
بوابة اتصال عن بعد بوابة طيران
بوابة طيران بوابة ملاحة
بوابة ملاحة
