مرحل
المرحِّل[1] هو مفتاح كهربائي يفتح ويغلق دارة تسمى دارة القدرة تحت تحكم دائرة أخرى تسمي دائرة التحكم، فهو إذًا يؤدي وظيفة العزل الكهربي أو ما يعرف باسم العزل الغلفاني بين الدائرتين.
مبدأ عمل المرحل
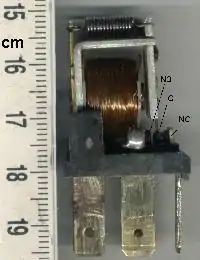
يعتمد المرحل في عمله على ملف مغناطيسي يقوم بجذب التلامسات (مفاتيح) المتحركة لتفصل أو تصل التيار فيها.
- يتكون المرحل مبدئيًّا من كهرمغنطيس يقوم بتطبيق قوة على التلامسات المتحركة أثناء تغديته.
- تتم تغدية الكهرمغنطيس، حسب الحاجة، إما بتوتر جهد منخفض (48v, 24v, 12v أو أقل) مستمر أو متردد، أو بتوتر منخفض (400v, 230v)
- يمكن أن يحتوي المرحل على مفتاح واحد أو عدة مفاتيح تكون إما مغلقة عادة أو مفتوحة عادة وتصمم هذه القاطعات أخذًا بعين الاعتبار قيمة التيار القصوى المطلوب وكذلك فرق الجهد القصوى الذي يجب أن تتحمله.
- ولأنه يحتوي أجزاء حركية، يأخد المرحل مدة زمنية لفتح وغلق القاطع.
- يمكن لمرحل أن يكون أحادي الاستقرار أو ثنائي الاستقرار.
اشتغال أحادي الاستقرار
تجذب الملامسات عند تغدية الوشيعة، وتعود لحالتها الأصلية بمجرد سحب التغذية،
اشتغال ثنائي الاستقرار بملف واحد
عند تغذية الملف تنجذب الملامسات، ولكن حتى وإن أزيلت التغذية تبقى الملامسات كما هي بفضل نظام ميكانيكي يمنع العودة، ولاسترجاع الحالة البدئية، غالبًا يتم ذلك بعكس قطبية التغذية الكهربائية.[2]
اشتغال ثنائي الاستقرار بملفين
يتم تنشيط الملف الأول لجذب القاطعات، وتبقى على حالها رغم قطع التغذية عنه، ولاسترجاع الحالة البدئية يجب تنشيط الملف الثاني.[2]
استعمالات
- الوظيفة الأولية للمرحل هي فصل دوائر التحكم عن دوائر القدرة، مثلًا من أجل قيادة تيار أو توتر مرتفع انطلاقًا من إشارة تحكم ضعيفة نسبيًّا.
- في العديد من التطبيقات يأمن المرحل سلامة العمال وأيضًا سلامة الأجهزة.
- يمكن أيضًا استعمال المرحلات لتصميم الوظائف المنطقية كما في أوائل الحواسيب.
خلفية تارخية
مرت طرق تصنيع المرحلات بعدة أجيال بدءًا من الأجهزة الكهرومغناطيسية مرورًا بأجهزة الوقاية الإستاتيكية وانتهاءً بأجهزة الوقاية الرقمية
الأجهزة الكهرومغناطيسية
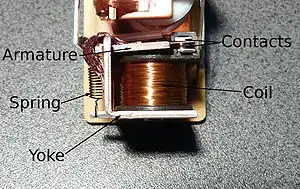
كما هو واضح من الاسم فإن فكرة عمل الجهاز تعتمد على استغلال خاصية أن التيار الكهربي الذي يمر في ملف ينشأ دائمًا مجالًا مغناطيسيًّا مصاحبًا له، وتصاحبه أيضًا قوة مغناطيسية يمكنها أن تجذب ذراع حديدية وتحركها. وتستغل هذه القوة المغناطيسية لتؤثر على قرص حديدي قابل للدوران فتجعله يدور.
ويستفاد من الحركة في كلا النوعين في غلق دائرة كهربية أخرى (هي دائرة تشغيل قاطع التيار). وبما أن القوة التي ستحرك الذراع، أو تدير القرص تتناسب طرديًّا مع شدة التيار المار في الملف. وبالتالي في الظروف الطبيعية، حيث التيار قيمته صغيرة فإن هذه القوة لن تكون كافية لتحريك الذراع أو إدارة القرص لغلق الدائرة. بينما في حالة الأعطال، حيث ترتفع قيمة التيار بشدة فستكون هذه القوة كافية لعمل الحركة المطلوبة وغلق دائرة تشغيل قاطع الدائرة.
المميزات
وتتميز هذه النوعية من الأجهزة بأنها مستقرة دائمًا، ولا تتأثر بالهزات التي قد تحدث في الشبكة، كما أن المهندسين قد اكتسبوا خبرات كبيرة في التعامل مع هذه الأجهزة طوال سنوات طويلة، وهذا يفسر السبب في بقائها في الخدمة رغم ظهور أجيال كثيرة حديثة بعدها.
العيوب
يعيب هذه الأجهزة البطء النسبي في الاستجابة بسبب أن الأجزاء المتحركة لها عَطالَة (طاقة مختزنة) فتحتاج لوقت لبدء الحركة، كما أنها تحتاج لصيانة منتظمة للأجزاء المتحركة، وتحتاج لمعايرة من فترة لأخرى لضمان دقة القياس.
الأجهزة الإستاتيكية
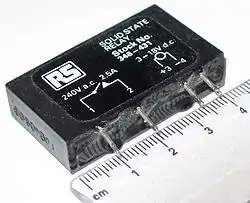
ظهر الجيل الثاني من المراحل في أوائل الستينات، وكان أهم ما يميزه هو استغناؤه عن الأجزاء المتحركة المستخدمة في الجيل السابق، والتي كانت تمثل مصدرًا للأخطاء في عمل الأجهزة. وقامت فكرة عمله على مقارنة قيمة التيار المار بالدائرة بحدود ضبط معينة، فإذا تعدى التيار المار بالدائرة قيم الضبط المستخدمة فإن المرحل يرسل إشارة فصل إلى قاطع التيار.[3]
ولكن يعيب هذه الأنواع أنها كانت تتأثر بتغير درجة الحرارة وبالتالي فهي غير مستقرة، ولذلك لم تستمر هذه النوعية طويلًا، حيث ظهر في أواخر الستينات وأوائل السبعينات الجيل الثالث من المراحل، وهو ما يعرف بأجهزة الوقاية الرقمية.
الأجهزة الرقمية
استطاع هذا الجيل أن يتغلب على كافة المشاكل التي واجهت الأجيال السابقة، ولذا فهي النوعية السائدة الآن في سوق أجهزة الوقاية. والفكرة الأساسية لهذه التكنولوجيا الجديدة هي تحويل إشارات الجهد والتيار إلى أرقام تخزن في ذاكرة الكمبيوتر مع تحديثها بصفة مستمرة خلال فترات زمنية صغيرة جدًّا تصل إلى 1 ملم ثانية.[4]
وبما أنه يستحيل تخزين كل القيم التي يتم قراءتها، فإنه يتم تخزين دورة أو اثنين من الجهد والتيار فقط، وكلما جاءت قيمة جديدة فإنها تحذف أقدم قيمة مخزنة.[5] ثم يتم بواسطة برنامج الوقاية المخزن بالجهاز تتبع التغير في قيم هذه الإشارات من خلال المعادلات، وبناءً على حجم التغير الذي يظهر من القيم الرقمية يمكن تحديد ما إذا كان هناك عطل أم لا.
وقد تطور هذا الجيل بعد ذلك، وأمكن إستحداث إمكانات جديدة لجهاز الوقاية لم يكن ممكنًا تنفيذها من قبل مثل تغير قيم ضبط الجهاز أوتوماتيكيًّا. ثم حدث التطور الأكبر حيث أمكن تبادل المعلومات بين أجهزة الوقاية الرقمية شيئًا سهلًا مما أحدث ثورة في إمكانات هذه النوعية من الأجهزة وقدرتها على اكتشاف الأعطال وتصنفيها بدقة هائلة.
المرحل الرقمي قابل التغير

في أواخر الثمانينيات بدأ التفكير يتجه إلى زيادة الاستفادة من الخبرات التي جناها العاملون في مجال الوقاية الرقمية، والاستفادة من تكنولوجيا المعالج الدقيق المستخدمة في هذه الأجهزة، حيث كان حتى هذه الفترة لا تزال أجهزة الوقاية الرقمية تقلد مثيلتها القديمة مع بعض التحسينات.[6]
وكان من أهم التطورات التي أدخلت في هذا المجال إدخال إمكانية تعديل قيم الضبط أوتوماتيكيًّا، لا سيما وأن المرحل لديه كافة المعلومات عن الشبكة. وكان التحدي هو كيفية التمييز بين الزيادة الطبيعية في الحمل، وبين العطل الذي ينشأ تيارًا قريبًا من تيار الحمل.[7]
المرحل متعدد الوظائف
في التسعينات، ظهر تطور جديد على أجهزة الوقاية الرقمية، حيث بدأت الشركات المنتجة في إدغام العديد من أجهزة الوقاية في جهاز واحد. وكانت فلسفة ذلك أن الجسم الخارجي لكل الأجهزة الرقمية يكاد أن يكون متشابهًا، والاختلاف بينهم فقط يكون في البرنامج المخزن به، ومع التطور في تقنيات التخزين صار ممكنًا تخزين العديد من البرامج الممثلة لأجهزة مختلفة داخل مرحل واحد. ولذلك تم تسميته بالمرحل متعدد الوظائف.
انظر أيضًا
مراجع
- الهيئة الكهروتقنية الدولية نسخة محفوظة 03 يناير 2018 على موقع واي باك مشين.
- Sinclair, Ian R. (2001), Sensors and Transducers (3rd ed.), Elsevier, ISBN 978-0-7506-4932-2
- Solid-state Relays نسخة محفوظة 03 يناير 2018 على موقع واي باك مشين.
- fault protection with a digital computer نسخة محفوظة 15 مارس 2020 على موقع واي باك مشين.
- a digital computer system for ehv substation نسخة محفوظة 2 مايو 2020 على موقع واي باك مشين.
- adaptive transmission system relaying نسخة محفوظة 2 مايو 2020 على موقع واي باك مشين.
- adaptive transmission relaying concepts for improved performance نسخة محفوظة 15 مارس 2020 على موقع واي باك مشين.
 بوابة إلكترونيات
بوابة إلكترونيات بوابة كهرباء
بوابة كهرباء بوابة هندسة ميكانيكية
بوابة هندسة ميكانيكية
