أنيماترونكس
الأنيماترونكس هو مجال متعدد التخصصات يدمج بين التشريح، الروبوتات، علم الميكانيك والحركة، وفن تحريك الدمى مما أدى إلى إنتاج الرسوم المتحركة النابضة بالحياة.[1][2]

.jpg.webp)
الأنيماترونكس أو إلكترونيات التحريك يشير إلى استخدام الأجهزة الروبوتية أو الروبوتات لمحاكاة الإنسان أو الحيوان أو إضافة خصائص حيوية للجمادات.[3][4] يصمم الروبوت ليكون تقليداّ مقنعاً ومماثلاَ للإنسان ويسمى هذا التقليد بالروبوت (أو الأندرويد).[5][6][7] الأنيماترونكس الحديثة قد أوجدت تطبيقات واسعة في مجال المؤثرات الخاصة التي تعنى بالأفلام ومدن الترفيه والتسلية، وقد عرفت منذ بداياتها بأنها كانت مشهداّ أساسياً في الترفيه.
الأنيماترونكس هو مجال متعدد التخصصات يدمج بين التشريح، الروبوتات، علم الميكانيك والحركة، وفن تحريك الدمى مما أدى إلى إنتاج الرسوم المتحركة النابضة بالحياة.[1][2] إن البنى والأشكال المصنوعة باستخدام الأنيماترونكس غالباَ تكون مدعمة بعلم الخصائص الميكانيكية وعلم السوائل المتحركة و/أو الوسائل الكهربائية، ويمكن تنفيذها والتحكم بها بوساطة الحاسوب أو بوساطة الإنسان، بما فيها التشغيل عن بعد. تستخدم غالباً المحركات الخاصة بالتحريك لتمثيل حركات العضلات وإنشاء حركة حقيقية في الأطراف. تغطى البنى والأشكال بقشور خارجية وجلود مرنة مصنوعة من مواد بلاستيكية صلبة ولينة، ويتم إنهاؤها بتفاصيل دقيقة مثل الألوان والشعر والريش وتفاصيل أخرى لجعل المجسم يبدو واقعياَ أكثر.
سبب التسمية
الأنيماترونكس هو دمج بين كلمتي animate (أنيمايت) بالانجليزية وتعني التحريك، وكلمة إلكترونيات (إلكترونكس) وتعني الإلكترونيات.[8]
المصطلح إلكترونيات حركة الصوت تمت صياغته بواسطة والت ديزني عندما بدأ باختراع الأنيماترونكس للترفيه والأفلام.
الأنيماترونكس الصوتية لا توجد فرقاَ بين الأنيماترونكس والروبوتات.
الأنيماترونكس التلقائية تمت تسميتها بواسطة فريق والت ديزني، وهي تصف الأنيماترونكس الأكثر تعقيداَ باستخدام الكاميرات والحساسات المعقدة لتحليل المعلومات الموجودة في بيئة المجسم وإعطاء استجابة بناءاَ للمحفز الخارجي.[9]
الخط الزمني
1220-1240: محفظة فيلارد دي هونكورت: يصور آلية ميزان مبكرة في رسم بعنوان كيفية جعل ملاكا حفاظ مشيرا بإصبعه نحو الشمس وإنسان من الطيور، مع أجنحة صوتها.
1515:ليوناردو دا فينشي صمم وبنى أسداَ يشغل ذاتياً.[10]

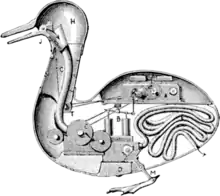
1738: بناء الآلي وبدأ في غرونوبل، فرنسا بواسطة جاك دي فوكانسون، لاعب الناي الأول يمكن أن يعزف اثنا عشر أغنية -لاعب الناي، متبوعا بلاعب على الناي والطبل أو الدف- لاعب الدف، يتضمن مع الحركة / الوقوقة / ضرب / اكل البط - البطة الهاضمة.[11]
1770: بير جاكيت درو، وابنه هنري لويس جاكيت درو، كلاهما صانعا ساعات سويسرية، بدءا بإجراء الآليات لملوك أوروبا.وبمجرد الانتهاء، فإنه تم اختراع ثلاث دمى، وكانت دمية واحدة قادرة على الكتابة، وكانت واحدة قادرة على عزف الموسيقى، ودمية ثالثة يمكنها رسم الصور.[12]
1801: جوزيف جاكار بنى النول التي يتم التحكم به بشكل مستقل مع البطاقات المثقبة.
1939: سباركو، الروبوت الكلب، الحيوان الأليف الخاص بإلكترو. يقدم عرضاً تقديمياً أمام العامة، لكن سباركو على عكس تصويرات الروبوتات في ذلك الوقت، مثّل كائناً حياً، وهكذا كان أول مجسم أنيماترونيك متحرك في العصر الحديث.[13][14]
1961: هاينريش إرنست صنع M H-1، اليد الميكانيكية التي تدار عن طريق الحاسوب.[15]
1961: والت ديزني بدأت بصك الميكاترونكس السمعية، وبدأت بتطوير تكنولوجيا الميكاترونكس الحديثة.[16]
1963: أول أنيماترونكس كاملة، طورت بواسطة والت ديزني, وكانت طيور تيكي الساحرة في ديزني لاند.
1964: في فلم ماري بوبنز، طيور الأنيماترونكس كانت أول مجسمات يتم عرضها في عرض سينمائي.
1965: أول مجسم أنيماترونكس لجسم الإنسان كان يمثل أبراهام لنكولن، وصنع بواسطة ديزني.
1968: صنعت أول شخصية أنيماترونكس في مطعم، سمّي بماريو الذهبي، وصنع بواسطة فريق يسمى بتيم بلت Team Built.
1977: مطعم تشاكي تشيز Chuck E. Cheese's افتتح أبوابه كأول مطعم يضم الأنيماترونكس كوسيلة جذب للزوار.
1980: مطعم بيتزا يسمى شو-بيز يفتتح "The Rock-afire Explosion" وهي فرقة أنيماترونكس.

1982: بن فرانكلين هو أول شخصية متحركة قادرة على المشي على مجموعة من السلالم.[17]
1989: تم تطوير أول متحرك A-100 في استوديوهات ديزني MGM لتمثيل الساحرة الشريرة الخاصة بالغرب.
1993: أكبر أنيماترونك متحرك على الإطلاق هو تي-ريكس لفيلم الحديقة الجوراسية.
1998: إلكترونيات النمر يبدأ بيع Furby، حيوان أليف متحرك مع أكثر من 800 من العبارات الإنجليزية مع القدرة على التفاعل مع بيئته.، فيرنون هيلز، إلينوي.
1999: شركة سوني العملاقة تطلق أيبو AIBO، الحيوان الأليف الخاص بالأنيماترونكس.اليابان، طوكيو.
2008: السيد رأس البطاطس في فيلم قصة لعبة يتميزبحركة الشفاه مع مجموعة متفوقة من الحركات عن أي شخصية متحرك أخرى في السابق، ستوديوهات ديزني هوليوود.[18]
2008-2009: ترقية مجسم أبراهام لنكولن لكي يشمل تكنولوجيا الأنيماترونكس التلقائية، قاعة الرؤساء.
2009: ديزني تطور "أوتو"، وهذا المجسم التفاعلي الأول التي يمكن أن يسمع ويرى ويحس الحركات التي تحصل حوله.
التاريخ
الأصول
في القرن الثالث قبل الميلاد الكاتبة ليزي تعبر عن مقابلة بين الملك "مو اوف زو" ومخترع يسمى ب"يان شي" الذي قدم للملك مجسم إنسان بالحجم الطبيعي. وقد وصفت بالشخصية كما كان قادرا على المشي، التشكل والغناء، وعندما فككت لوحظ أنها تتكون من أجهزة دقيقة تشريحياَ.
في القرن الخامس قبل الميلاد يعزى الفيلسوف الموزي وله بان لو المعاصر لاختراع الطيور الخشبية الاصطناعية (أماه يوان) التي يمكن أن تطير بنجاح في هان فاي زي. وفي عام 1066، شكّل المخترع الصيني سونغ سو المياه على مدار الساعة في شكل برج والتي ظهرت على شكل تماثيل ميكانيكية.
في عام 1515, صمم ليوناردو دا فينشي وبنى الباردون الأسد، واحدة من أقدم الأنيماترونكس. وقدم الأسد الميكانيكية جوليانو دي ميديشي في فلورنسا لفرانسوا الأول ملك فرنسا كرمز للتحالف بين فرنسا وفلورنسا. أعيد بناء الباردون الأسد في عام 2009 وفقا لتوصيف المعاصرة ورسومات دافنشي الخاصة. وقبل ذلك، كان دا فينشي قد صمم وعرض فارس الميكانيكية في احتفال لودوفيكو سفورزالتذي استضاف في محكمة ميلانو في عام 1495.وكان روبوتاً قادراَ على القيام والقعود، وفتح قناعه وتحريك سلاحه. تم اكتشاف الرسوم في 1950 وتم بناء نسخة طبق الأصل في وقت لاحق.
الساعات
تم تصميم الساعات في وقت مبكر أيضاّ كالمستجدات والنظارات التي تدمج ملامح الأنيماترونكس في وقت مبكر. وكتب فيلارد دي هونكورت حافظة فيلارد دي هونكورت الذي يصور آلية ميزان في رسم بعنوان كيفية جعل ملاكا يحافظ على إصبعه مشيراَ نحو الشمس وإنسان من الطيور، مع أجنحة، أدى تنفيذ تصميمها إلى اختراع الساعات، بسبب حجمها وتعقيدها، وقد بنيت معظم هذه الساعات في مركز المدينة. كان واحداَ من هذه الساعات الكبيرة ستراسبورغ، الذي بني في القرن الرابع عشر الذي يوجد على كامل جدار الكاتدرائية. كما أنه يحتوي على تقويم فلكي، والآلي وتصور الحيوانات، والقديسين وحياة المسيح.لا يزال يعمل على مدار الساعة حتى يومنا هذا ولكن شهد عدة ترميمات منذ البناء الأول. وكان أول وصف من ساعة الوقواق الحديثة اوغسبورغ النبيل فيليب في عام 1629.تعود عقارب الساعة إلى أمير فون سكسونيا. قبل 1650، فهو فهم طريقة عمل الوقواق الميكانيكية وتم نشرها على نطاق واسع في كتيب أثناسيوس كيرشر على الموسيقى، في ما هو الوصف الأول موثق لكيفية عمل الوقواق الميكانيكية، الذي وصف جهاز ميكانيكي مع العديد من الشخصيات الآلية. وفي القرن الثامن عشر في ألمانيا، بدأت clock-makers بصنع ساعات الوقواق للبيع.
المجسمات الجاذبة للزوار
وليمة في كاميلا أراغون في إيطاليا، 1475، وأظهرت بعضاً من الميكاترونكس النابضة بالحياة. كان الميكاترونك جزءاّ من العرض الأكبر الذي استمر على مدى أيام.وفي عام 1454، أنشأ فيليب دوق عرضا الترفيه يدعى عيد باهظة من الدراج، الذي كان يهدف إلى التأثير على الشعب للمشاركة في حملة صليبية ضد العثمانيين ولكن انتهى الأمر بعرض كبير من أنيماترنكس، عمالقة، وأقزام. جيوفاني فونتانا، وهو مهندس عام 1420، وضع دمية من الكامليد يقودها الرئيسي الملبس ضعف ارتفاع للإنسان وإنسان من مريم المجدلية.
التطبيقات الحديثة
مبادئ الأنيماترونكس الحديثة يمكن العثور عليها في الروبوتات القديمة. وفي حين أن بعض هذه الروبوتات كانت في الوقت القديم الخاص بالروبوتات لأن تحريك الروبوتات كان قبل أن تصبح للأنيماترونكس شعبية.
وكان التحريك للظهور أمام الجمهور الكلب والحصان. كانت خلال معرض نيويورك الدولي 1939. سباركو، الروبوت الكلب، والحيوانات الأليفة من إلكترو للروبوت، ويؤدي أمام الجمهور في معرض نيويورك الدولي 1939 ولكن سباركو ليس مثل الروبوتات العادية. سباركو يمثل الحيوانات الحية، ليصبح بذلك أول شخصية متحركة للعصر الحديث، جنباَ إلى جنب مع الحصان الذي لم يكشف عن اسمه. كان الراكب على الحصان متحركاَ في معرض في عام 1939.
كثيرا ما يعزو والت ديزني لتعميم تقنيات التحريك للترفيه بعد أن اشترى الطيور المتحركة بينما كان يقضي عطلة، على الرغم من الجدل بشأن ما إذا كان في نيو اورليانز أو أوروبا. وقد ركزت رؤية ديزني السمعية والتحريك في المقام الأول على شاشات الوطنية بدلا من الملاهي.
في عام 1951، بعد عامين من اكتشاف والت ديزني التحريك، كلف الماكنه بروغي روجروالنحات واثل روجرز لقيادة الفريق المكلف لصنع الرقم طويل القامة 9 التي يمكن أن يتحرك ويتحدث ومحاكاة رقصات يؤديها الأصدقاء. وكان عنوان المشروع "مشروع ليتل مان"ولكن تم الانتهاء أبداَ. وبعد مرور عام، تم إنشاء والت ديزني للتخيل الابتكاري.
بعد "مشروع ليتل مان"، وكان فريق التخيل الابتكاري في أول مشروع ديزني ل"رئيس الصين" الذي أقيم المعرض في بهو مناصبهم. ويمكن للعملاء طرح الأسئلة وانها سترد مع كلمات الحكمة.
بدأت شركة إنتاج والت ديزني باستخدام تقنيات التحريك في عام 1955 لركوب ديزني لاند، الغابة كروز، وفي وقت لاحق لجاذبيتها مسحور غرفة تيكي والت ديزني التي ظهرت أنيماترونكس مسحور تيكي الطيور.
كان شخصية الإنسان الأول باكتمال السمعية ومتحرك ابراهام لنكولن، التي أنشأتها والت ديزني في عام 1964 لمعرض في عام 1964 العالمي في نيويورك. في عام 1965، ورفع مستواها ديزني وصاغ أنها لينكولن مارك الثاني، والتي ظهرت في دار الأوبرا في منتجع ديزني لاند في كاليفورنيا لمدة ثلاثة أشهر، أجرى لينكولن الأصلي في نيويورك، في حين أن لنكولن مارك الثاني لعب العروض في ديزني لاند. كانت مطابقة لغة الجسد وحركات الوجه إلى الكمال مع خطاب مسجل. أعرب الممثل الملكي دانو النسخة التحريك من ابراهام لنكولن.
محظوظ الديناصور هو Segnosaurus حوالي 8 أقدام طويل القامة (2.4 م) الأخضر الذي يسحب عربة مغطاة الزهور ويقودها "تشاندلر معالج الديناصور". محظوظ هو ملحوظ في أنه كان أول شخصية خالية من جوالة السمعية ومتحرك. العربة زهرة يسحب يخفي المصدر الكمبيوتر والسلطة.
والدمى المحمولة هي خالية من المتجولين، السمعية ومتحرك الترفيه جذب صممه والت ديزني في التخيل الابتكاري. اثنين من شخصيات العرائس، الدكتور بنسن المن ومساعد له، بيكر، والطيار السيارة من خلال الحديقة، التي تتفاعل مع الضيوف وتنشر المؤثرات الخاصة مثل ذر الضباب، ومدافع حلويات طائرات رشاشة. وتنتشر حاليا في ديزني لاند في هونج كونج.
الفيلم والتلفيزيون
وكانت صناعة الفيلم القوة الدافعة في التكنولوجيا المستخدمة لتطوير تقنيات التحريك.
وتستخدم تقنيات التحريك في الحالات التي يكون فيها عدم وجود المخلوق، والعمل هو مخاطرة كبيرة جدا أو مكلفة لاستخدام الجهات الفاعلة أو حيوانات حقيقية، أو عمل لا يمكن أبدا أن يحصل مع شخص حي أو حيوان. ميزته الرئيسية على CGI والتوقف عن الحركة هي أن المخلوق محاكاة له وجود مادي يتحرك أمام الكاميرا في الوقت الحقيقي. أصبحت التكنولوجيا وراء التحريك أكثر تقدما وتطورا على مر السنين، مما جعل الدمى تبدو أكثر حيوية.
تم إدخال تقنيات التحريك أول مرة من قبل ديزني في عام 1964 فيلم ماري بوبينس التي ظهرت الطيور متحركة. ومنذ ذلك الحين، تم استخدام تقنيات التحريك على نطاق واسع في أفلام مثل الفك المفترس، وإي.تي. وخارج الأرض، التي تعتمد اعتمادا كبيرا على التحريك.
وكانت الإدارة مثل ستيفن سبيلبرغ وجيم هنسون الرواد في مجال استخدام تقنيات التحريك في صناعة السينما.
استخدام الحديقة الجوراسية 1993 فيلم مجموعة من الصور على الحاسوب ولدت بالتزامن مع ديناصور متحرك بالحجم الطبيعي بناها ستان وينستون وفريقه. متحرك "ريكس T." وينستون وبلغ ما يقرب من 20 قدما (6.1 متر)، 40 قدم (12 متر) في الطول وحتى أكبر التحريك وزنها كانت 9000 جنيه استرليني (4100 كلغ) قادرة على إعادة تماما مظهر والحركة الطبيعية على الشاشة من ريكس الديناصور كاملة الحجم.
دعا جاك هورنر أنه " لقد كنت الأقرب من أي وقت مضى لعيش الديناصورات ".وأشار سبيلبرغ إلى الديناصورات أنها مذهلة - ومخيفة -وواقعية .
تم إنتاج مسلسل بي بي سي 1999 المشي مع الديناصورات باستخدام مزيج من نحو 80٪ CGI و20٪ نماذج متحرك. جودة الصور كانت جيدة، ولكن كانت التحريك لا يزال أفضل في اللقطات عن بعد، وكذلك المقربة من الديناصورات. وقد صممت سلسلة التحريك من قبل شركة التحريك البريطانية المخلوقات كراولي. وأعقب هذا المعرض في عام 2007 مع التكيف المباشر لهذه السلسلة، والمشي مع الديناصورات.
جيف بيترسون هو هيكل عظمي بشري متحرك، غالبا ما يشار إليها باسم "الهيكل العظمي الروبوت"، بيترسون هو روبوت دمية متحرك.
الإعلام
الحملة الإعلانية البريطانية كادبوري بعنوان شويبس أظهرت ممثل داخل بدلة غوريلا مع وجه الرسوم المتحركة.
كان Slowskys حملة إعلانية لXfinity خدمة الإنترنت ذات النطاق العريض كومكاست كيبل. يتميز الإعلان بأنه يظهر اثنين من السلاحف الأنيماترونكس المتحركة، وفازت بالميدالية الذهبية في جائزة إيفي في عام 2007.
الألعاب
وتشمل بعض الأمثلة مثل تيدي Ruxpin، الفم الكبير بيلي باس، كوتا وترايسيراتوبس، بليو، WowWee شمبانزي، مايكروسوفت Actimates، وFurby.
التصميم
مبني على حرف التحريك حول إطار دعم داخلي، عادة ما تكون مصنوعة من الفولاذ. تعلق على هذه "العظام" "العضلات" التي يمكن تصنيعها باستخدام الشباك مرنة تتألف من حبات الستايرين. يوفر إطار الدعم للإلكترونيات والمكونات الميكانيكية، فضلا عن توفير شكل للجلد الخارجي.
"الجلد" غالبا ما يصنع من رغوة المطاط والسيليكون أو يوريتان صب في قوالب. لتوفير مزيد من القوة وقطع قطعة من القماش على حجمه وجزءا لا يتجزأ من المطاط الرغوي بعد سكبه في القالب. ويتم فصل كل قطعة وتعلق على السطح الخارجي للشخصية لتوفير المظهر والملمس مماثلة لتلك التي من "الجلد".
البنية
وعادة ما يتم تصميم طابع التحريك أن تكون واقعية قدر الإمكان. وبالتالي، هو مبني على غرار كيف يمكن ان تكون في واقع الحياة. في إطار هذا الرقم هو مثل "هيكل عظمي". المفاصل، والمحركات، والمحركات تعمل باسم "العضلات". تربط جميع المكونات الكهربائية معا والأسلاك، مثل "الجهاز العصبي" من حيوان حقيقي أو شخص.
الهيكل العظمي أو الإطار
تستخدم المواد الصلبة والألمنيوم والبلاستيك والخشب عادة في التحريك ولكن كل لديه أفضل الغرض منه. القوة النسبية، وكذلك الوزن، يجب أخذه في الاعتبار عند تحديد المادة الأكثر ملائمة للاستخدام. قد تكون تكلفة المواد أيضا مصدرا َ للقلق.
الغطاء الخارجي أو الجلد
تستخدم عدة مواد عادة في تصنيع الشكل الخارجي لشخصية التحريك. وتعتمد على ظروف خاصة، وأفضل المواد سوف تستخدم لإنتاج الشكل الأكثر نابض بالحياة.
على سبيل المثال، "العيون" و"الأسنان" مصنوعة عادة تماماَ من الاكريليك.
لبن الشجر أو اللاتكس
يستخدم اللاتكس الأبيض عادة كالمادة العامة لأنه يحتوي على مستوى عال من المرونة. بل هو أيضاَ مبركن، مما يجعلها سهلة وسريعة للتطبيق. ويتم إنتاج المطاط في درجات عدة. الصف 74 هو شكل الأكثر شعبية من المطاط الذي يجف بسرعة ويمكن تطبيقها وتكون سميكة جدا، مما يجعلها مثالية لتطوير القوالب.
رغوة اللاتكس خفيفة الوزن، ومن المطاط الذي يستخدم في أقنعة الوجه والأطراف الصناعية لتغيير مظهر الشخص الخارجي، وفي التحريك لخلق "الجلد" الواقعي. كان ساحر أوز واحدة من أول الأفلام للاستفادة واسعة من الأطراف الصناعية ورغوة المطاط في 1930.
السيليكون
ديزني لديها فريق الأبحاث المكرسة لتحسين وتطوير أساليب أفضل من خلق التحريك الخارجيات أكثر واقعية مع السيليكون.
يستخدم RTV سيليكون (درجة حرارة الغرفة الفلكنة سيليكون) في المقام الأول كمادة صب لأنه من السهل جدا للاستخدام ولكن غير مكلفة نسبيا.
تتم إزالة الفقاعات من السيليكون عن طريق سكب مادة سائلة في تيار رقيقة أو التجهيز في فراغ الغرفة قبل استخدامها. يستخدم السيليكا كعامل يستكثر لطلاء أكثر سمكاَ من المواد.
البولي يوريثين
البولي يوريثان المطاط هو أكثر المواد الفعالة تكلفة لاستخدامه بدلا من السيليكون. يأتي البولي يوريثان في مستويات مختلفة من الصلابة التي يتم قياسها على مقياس شور. يستخدم جامد رغوة البولي يوريثان في النماذج وغالبا ما تستخدم رغوة البولي يوريثان المرنة في بناء الشخصية النهائي لأنه مرن ويتكون بشكل جيد مع اللاتكس.
الجص
شائع في البناء وتزيين المنزل، والجص متاح على نطاق واسع. صلابته يحد من استخدامه في قوالب. وهذا قد يجعل الجص أكثر صعوبة بكثير من استخدام من المواد ليونة مثل المطاط أو السيليكون.
الحركة
المحركات الهوائية يمكن استخدامها لتقنيات التحريك صغيرة ولكنها ليست قوية بما فيه الكفاية لتصاميم كبيرة ويجب أن تستكمل مع الهيدروليكية. لخلق حركة أكثر واقعية بأرقام كبيرة، يتم استخدام نظام تمثيلي عموما إلى إعطاء مجموعة كاملة من حركة السوائل بدلا من بسيطة حركتين الموقف.
نمذجة المشاعر
واحد من النماذج العاطفية الأكثر شيوعا هو نظام عمل ترميزالوجه (FACS) التي وضعتها أيكمن وفريسين. يحدد نظام مراقبة الأصول الميدانية أنه من خلال تعبيرات الوجه، والبشر يمكن التعرف على العواطف الأساسية: الغضب والاشمئزاز والخوف والفرح والحزن، والدهشة. نظرية أخرى هي أن من Ortony، كلور، وكولينز، أو نموذج أورينت والذي يحدد 22 فئة مختلفة العاطفية.
التعليم والتدريب
تم تطوير تقنيات التحريك على النحو الوظيفي الذي يجمع بين تخصصات الهندسة الميكانيكية، الصب / النحت، وتقنيات التحكم، الأنظمة الإلكترونية الكهربائية /، راديو وأيربروشينغ.
بعض الكليات والجامعات لا تقدم برامج درجة في التحريك. الأفراد المهتمين في التحريك يحصلون على شهادة في مجال الروبوتات التي تتصل اتصالا وثيقا بالتخصصات المطلوبة في هندسة التحريك.
الطلاب يحققون درجة البكالوريوس في مجال الروبوتات في:
هندسة ميكانيكية
الروبوتات الصناعية
نظم الميكاترونيك
نمذجة أنظمة الروبوتات
هندسة الروبوتات
نظرية تأسيسية في الروبوتات
مقدمة في الروبوتات
انظر ايضاَ
المراجع
- animatronics introduction نسخة محفوظة 27 أبريل 2016 على موقع واي باك مشين.
- animatronics - definition of animatronics in English | Oxford Dictionaries نسخة محفوظة 17 أغسطس 2016 على موقع واي باك مشين.
- (PDF) https://web.archive.org/web/20160910092746/http://tsaweb.org/sites/default/files/HS-Animatronics-tri-fold-lite.pdf. مؤرشف من الأصل (PDF) في 10 سبتمبر 2016. الوسيط
|CitationClass=تم تجاهله (مساعدة); مفقود أو فارغ|title=(مساعدة) - Digication e-Portfolio :: Animatronics :: Welcome نسخة محفوظة 31 أغسطس 2020 على موقع واي باك مشين.
- Android | Definition of Android by Merriam-Webster نسخة محفوظة 15 ديسمبر 2017 على موقع واي باك مشين.
- (PDF) https://web.archive.org/web/20120406201534/http://www.eecs.tufts.edu/~mpoor01/DiscertationStuff/Animatronics%20[Robotics]/AndroidScience5.pdf. مؤرشف من الأصل (PDF) في 6 أبريل 2012. اطلع عليه بتاريخ أكتوبر 2020. الوسيط
|CitationClass=تم تجاهله (مساعدة); تحقق من التاريخ في:|تاريخ الوصول=(مساعدة); مفقود أو فارغ|title=(مساعدة) - Frequently Asked Questions - Extreme Dinosaurs - Atlanta | Premier Exhibitions نسخة محفوظة 16 يوليو 2018 على موقع واي باك مشين.
- Animatronic | Define Animatronic at Dictionary.com نسخة محفوظة 04 مارس 2016 على موقع واي باك مشين.
- 6 Cool—And Creepy—Animatronic Advancements نسخة محفوظة 23 أكتوبر 2014 على موقع واي باك مشين.
- Bedini, Silvio A. (1964). "The Role of Automata in the History of Technology". Technology and Culture. 5 (1): 24. doi:. جايستور 3101120. نسخة محفوظة 19 ديسمبر 2018 على موقع واي باك مشين.
- Fryer, David M.; Marshall, John C. (1979). "The Motives of Jacques de Vaucanson". Technology and Culture. 20 (2): 257. doi:. جايستور 3103866. نسخة محفوظة 19 ديسمبر 2018 على موقع واي باك مشين.
- The Defecating Duck, or, the Ambiguous Origins of Artificial Life | Critical Inquiry: Vol 29, No 4 نسخة محفوظة 2020-09-15 على موقع واي باك مشين.
- "An introduction to Animatronics". prezi.com. مؤرشف من الأصل في 4 أبريل 2019. اطلع عليه بتاريخ 25 ديسمبر 2016. الوسيط
|CitationClass=تم تجاهله (مساعدة) - Corporation, Bonnier (2016-12-25). Popular Science (باللغة الإنجليزية). Bonnier Corporation. مؤرشف من الأصل في 23 أبريل 2020. الوسيط
|CitationClass=تم تجاهله (مساعدة) - Ernst, Heinrich Arnold (2005-08-04). "MH-1, a computer-operated mechanical hand". ResearchGate. مؤرشف من الأصل في 04 أبريل 2019. الوسيط
|CitationClass=تم تجاهله (مساعدة) - Ayala, Alfredo Medina (2010-10-20). Ficarra, Francisco V. Cipolla; Lozano, Carlos de Castro; Jiménez, Mauricio Pérez; Nicol, Emma; Kratky, Andreas; Cipolla-Ficarra, Miguel (المحررون). Advances in New Technologies, Interactive Interfaces, and Communicability. (باللغة الإنجليزية). Springer Berlin Heidelberg. صفحات 8–15. doi:10.1007/978-3-642-20810-2_2#page-1. ISBN 9783642208096. مؤرشف من الأصل في 20 نوفمبر 2018. الوسيط
|CitationClass=تم تجاهله (مساعدة) - Webb, Michael (1983-01-01). "The Robots Are Here! The Robots Are Here!". Design Quarterly (121): 4–21. doi:10.2307/4091102. مؤرشف من الأصل في 23 أبريل 2020. الوسيط
|CitationClass=تم تجاهله (مساعدة) - Clark, Eric (2007-01-09). The Real Toy Story: Inside the Ruthless Battle for America's Youngest Consumers (باللغة الإنجليزية). Simon and Schuster. ISBN 9780743298896. مؤرشف من الأصل في 23 أبريل 2020. الوسيط
|CitationClass=تم تجاهله (مساعدة)
10.2307/3101120 10.2307/3103866
 بوابة روبوتيات
بوابة روبوتيات بوابة تقانة
بوابة تقانة بوابة سينما
بوابة سينما
