نهاية الروبوت العاملة
نهاية الروبوت العاملة هي الجهاز في نهاية ذراع الروبوت وقد صمم من أجل أن بقوم بوظائف خاصة. وتعتمد طبيعة ونوعية هذا الجهاز على طبيغة ونوع العمل الذي سيقوم به الروبوت الصناعي. ويمكن تبديل هذه النهاية من أجل القيام بوظيفة أخرى. يتم تثبيت هذا الجهاز في منطقة من الروبوت تعرف باسم نقطة مركز الأداة TCP
أمثلة
من الأمثلة على هذه النهايات رأس اللحام أو بخاخ الرسم. كما يمكن أن نكون هذه النهاية مشرط جراحي أو أي أداة أخرى يمكن أن تستخدم في العمليات الجراحية. ومن التطبيقات الصناعية ريشة تثقيب أو رأس تفريز.:[1] كما يمكن أن تكون رأس تجميع وتركيب مكونات مثل ماهو شائع في استخدام سكارا
- أمثلة على نهاية الروبوت العاملة
 مثال علىنهاية عاملة على شكل فك للامساك بالمواد
مثال علىنهاية عاملة على شكل فك للامساك بالمواد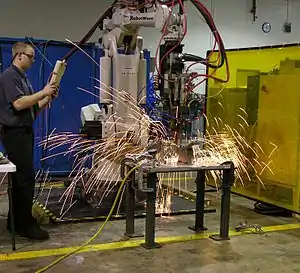 نهاية عاملة لرأس لحام
نهاية عاملة لرأس لحام نهاية عاملة للإصلاح والمراقبة مستخدمة في الفضاء(Canadarm)
نهاية عاملة للإصلاح والمراقبة مستخدمة في الفضاء(Canadarm)
المراجع
- Monkman, G. J.; Hesse, S.; Steinmann, R.; Schunk, H. (2007). Robot Grippers. Wiley-VCH. صفحة 62. ISBN 978-3-527-40619-7. الوسيط
|CitationClass=تم تجاهله (مساعدة)
 بوابة روبوتيات
بوابة روبوتيات
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.