بناء نموذج ثلاثي الأبعاد من عدة صور
البناء ثلاثي الأبعاد المستخرج من صور متعددة هو إنشاء نماذج ثلاثية الأبعاد من مجموعة من الصور. إنها عملية عكسية للحصول على صور ثنائية الأبعاد من المشاهد ثلاثية الأبعاد.جوهر الصورة هو إسقاط من مشهد ثلاثي الأبعاد على مستوى ثنائي الأبعاد ، وخلال هذه العملية يتم فقدان العمق. إن النقطة الثلاثية الأبعاد المقابلة لنقطة صورة محددة مقيدة لتكون على خط الرؤية. من صورة واحدة ، من المستحيل تحديد أي نقطة على هذا الخط تقابل نقطة الصورة. في حالة توفر صورتين ، يمكن العثور على موضع نقطة ثلاثية الأبعاد كالتقاطع بين أشعة العرض. ويشار إلى هذه العملية بالتثليث. المفتاح لهذه العملية هو العلاقات بين وجهات زوايا النظر المتعددة التي تنقل المعلومات بأن مجموعات النقاط المقابلة يجب أن تحتوي على بعض البنية وأن هذه البنية مرتبطة بالوضع ومعايرة الكاميرا.في العقود الأخيرة ، هناك طلب هام على المحتوى ثلاثي الأبعاد لرسومات الكمبيوتر ، والواقع الافتراضي والتواصل ، مما أدى إلى تغيير في التركيز على المتطلبات. يتم إنشاء العديد من الأنظمة الحالية لإنشاء نماذج ثلاثية الأبعاد حول أجهزة متخصصة (مثل أجهزة الاستريو) مما يؤدي إلى تكلفة عالية ، والتي لا يمكنها تلبية متطلبات تطبيقاتها الجديدة. هذه الفجوة تحفز استخدام مرافق التصوير الرقمي (مثل الكاميرا). كما يخبرنا قانون مور أن المزيد من العمل يمكن أن يتم في البرمجيات. تم اقتراح طريقة مبكرة من قبل Tomasi و Kanade.[2] استخدموا منهج توحيد العوامل لاستخراج 3D من تسلسلات الصور. ومع ذلك ، فإن افتراض الإسقاط العمودي هو وجود قيود كبيرة على هذا النظام.

التجهيز
تتكون مهمة تحويل صور ثنائية الأبعاد متعددة إلى نموذج ثلاثي الأبعاد من سلسلة من خطوات المعالجة:تتكون معايرة الكاميرا من معلمات داخلية وخارجية ، والتي بدونها لا يمكن ترتيب أي خوارزميات عند مستوى معين. يوضح الخط المنقط بين تحديد المعايرة والعينة أن معايرة الكاميرا مطلوبة عادةً لتحديد العمق. ويُعد تحديد العمق الجزء الأكثر تحديًا في العملية بأكملها ، حيث يحسب المكون الثلاثي الأبعاد المفقود من أي صورة - عمق. مشكلة المراسلات ، العثور على تطابقات بين صورتين بحيث يمكن بعد ذلك وضع المثلثات في مساحة ثلاثية الأبعاد هي القضية الرئيسية هنا. بمجرد أن يكون لديك خرائط عمق متعددة يجب عليك دمجها لإنشاء شبكة نهائية عن طريق حساب العمق وإسقاط خارج الكاميرا - التسجيل. سيتم استخدام معايرة الكاميرا لتحديد أين يمكن الجمع بين الشبكات المتعددة التي تم إنشاؤها بواسطة خرائط العمق معًا لتكوين مخطط أكبر ، مما يوفر أكثر من عرض واحد للمراقبة. في مرحلة تطبيق المواد ، يكون لديك شبكة كاملة ثلاثية الأبعاد ، والتي قد تكون الهدف النهائي ، ولكنك عادةً ستحتاج إلى تطبيق اللون من الصور الأصلية على الشبكة. يمكن أن يتراوح ذلك بين إسقاط الصور على الشبكة بشكل عشوائي ، من خلال مقاربات الجمع بين القوام من أجل الدقة الفائقة وأخيرًا لتقسيم الشبكة بالمواد ، مثل الخصائص المرئية والمنتشرة.

المراجع
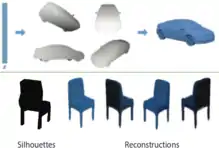
- "Soltani, A. A., Huang, H., Wu, J., Kulkarni, T. D., & Tenenbaum, J. B. Synthesizing 3D Shapes via Modeling Multi-View Depth Maps and Silhouettes With Deep Generative Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (pp. 1511-1519)". مؤرشف من الأصل في 09 مايو 2018. الوسيط
|CitationClass=تم تجاهله (مساعدة); تحقق من التاريخ في:|تاريخ أرشيف=(مساعدة) - "Carnegie Mellon University data repository". kilthub.figshare.com (باللغة الإنجليزية). مؤرشف من الأصل في 09 يناير 2019. اطلع عليه بتاريخ 18 نوفمبر 2018. الوسيط
|CitationClass=تم تجاهله (مساعدة); تحقق من التاريخ في:|تاريخ أرشيف=(مساعدة)
 بوابة صور رقمية
بوابة صور رقمية بوابة علم الحاسوب
بوابة علم الحاسوب